中国空间站机械臂有哪些黑科技?
原标题:中国空间站机械臂有哪些黑科技?一问到底→
12月27日凌晨0时55分,经过约6小时的出舱活动,神舟十三号航天员乘组圆满完成了第二次出舱全部既定任务,这也是空间站阶段航天员的第四次出舱。
此次航天员出舱,最重要的任务之一,就是进一步验证机械臂的相关设计。这个充满科技感的大家伙,就是目前我国自主研制智能程度最高、技术难度最大、系统最复杂的空间智能制造系统,机械臂。它既能像人的胳膊一样灵活转动,还能在空间站到处爬行。力气大,够灵活,颜值高,本领多,是航天员们出舱作业少不了的好帮手。
机械臂到底身长几何?体重多少?是如何爬行的?爬的速度有多快?在它身上还有哪些我们不了解的高科技?一问到底↓
机械臂主要承担哪些在轨任务?
专家告诉我们,作为目前同类航天产品中复杂程度与控制精度最高、规模最大的空间智能机械系统,机械臂主要承担着舱段转位、航天员出舱活动、舱外货物搬运、舱外状态检查、舱外大型设备维护等八大类在轨任务。
长10.2米 机械臂如何在太空自如爬行?
机械臂全长10.2米,为了扩大任务触及范围,它还具备“爬行”功能。在最近四次出舱任务当中,都充当了航天员专属交通工具的角色。大家可能很好奇,这么大的一个机械臂是如何在太空爬行的,它会不会掉下来呢?
由于机械臂采用了3个肩关节,1个肘关节和3个腕关节的配置方案,肩部和腕部关节配置相同,也就是说机械臂两端可以实现同样的活动功能。
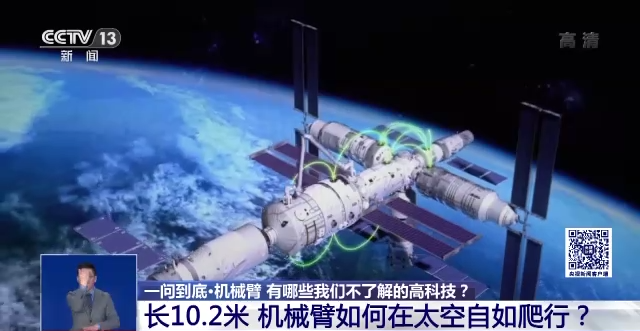
航天科技集团五院空间站机械臂技术负责人胡成威介绍,机械臂在空间站进行爬行的过程,可以形象地看成是猴子在树林之间穿行,首先一只手抓住树枝做固定,另一只手松开,再抓住前方的另一个树枝,如此反复实现爬行。猴子的手就是安装在机械臂肩部与腕部的末端执行器,而树枝就是空间站舱体表面安装的目标适配器。当然,这个抓住和松开的过程非常复杂。
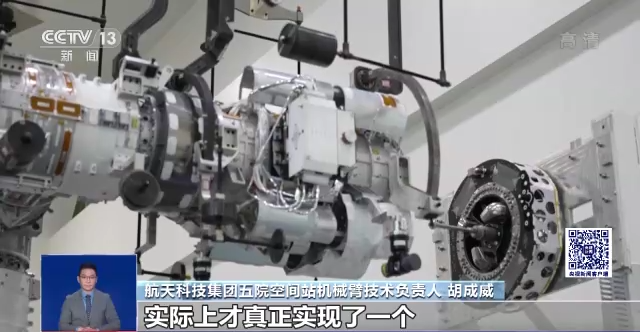
航天科技集团五院空间站机械臂技术负责人胡成威:这里边有三根绳索,杆伸到孔里头,这样的话钢丝绳收拢的时候就捕获住了,捕获就是完成第一步。捕获住之后杆上有个球形的头,机械臂往回收的时候绳子要带着头,拉着两个对接面靠近,这叫拖动。那么拖动完成之后,还有最后一步就是锁紧,锁紧上面有4个像耳朵似的,就有4个机构,对准了之后,4个机构同步往后推,它们之间进行电连接和机械的锁紧,完成之后,实际上它实现了末端和目标之间的一个真正的捕获。
推荐阅读

春节放心买!5家快递企业已宣布“春节不打烊”
北京日报客户端2021-12-28 04:26:45
茅台原董事长袁仁国被取消国家“非遗”传承人资格
文化和旅游部2021-12-28 04:24:35
西北大学实施封闭管理 按宿舍指派学生到餐厅带餐
央视新闻客户端2021-12-28 04:19:10
挺进深蓝 中国海军亚丁湾护航13年展现大国担当
央视网2021-12-27 14:19:12
“中国古代饮食文化展”明日开展 观众可亲手制作面食
新京报2021-12-27 19:51:01
旗手”无人机对决“铠甲”防空系统,谁更胜一筹?
参考消息2021-12-27 14:13:03
西安回应确诊病例为何突然增多:加大了筛查力度和出现新的风险点位
群众新闻2021-12-28 02:24:04
京东美团等20余家电商公司被西安市约谈:责令平抑价格、加强配送
群众新闻2021-12-28 01:38:33
官方确认山西6名失踪者遇难:在废弃金矿牟利已立案侦查
绛县人民政府2021-12-28 02:32:34
国际丨加拿大多省发布极寒预警 创纪录寒潮带来零下50℃气温
新京报2021-12-27 20:40:00
女大学生辱骂骑手“你就是送外卖的狗”,学校回应
潇湘晨报2021-12-28 02:48:14
女模发现陌生女相册有自己睡房照 对方系丈夫情人
2017-11-30 14:32:06
英若诚,把《茶馆》“开到”国外的艺术家丨夜问
新京报2021-12-27 21:21:00
国际丨现场:以色列为遏制奥密克戎毒株 开始试打第四针新冠疫苗
新京报2021-12-27 22:00:00
听在阿富汗调查的中国学者讲述塔利班执政现状
环球时报2021-12-27 14:28:55
美媒:一名完全接种疫苗的美军人员死于新冠
环球网2021-12-27 16:24:18
国际丨41岁比利时搏击冠军患新冠去世:曾拒去医院在家自治
新京报2021-12-27 20:30:00
乌克兰官员否认俄方在边界地区大举增兵
参考消息2021-12-27 14:34:02
男子得知西安将全城严控 骑车10小时逃离避检查
上游新闻2021-12-28 02:01:03
“相约北京”奥林匹克文化节暨“相约北京”国际艺术节即将开幕
新京报2021-12-27 19:51:01
美前司令称韩美作战计划应涵盖应对中国方案
环球网2021-12-27 16:01:34
“猎户座-E”量产,无人作战再添黑马
2021-12-27 13:10:05
乌克兰女性将进行兵役登记:包括孕妇和有小孩的
观察者网2021-12-27 15:50:56
任达华:是时候做导演了|人物
新京报2021-12-27 19:31:00
日媒:若“台海爆发战事” 美将把西南诸岛当据点
参考消息2021-12-27 14:31:24
18岁女孩被姐夫投毒百草枯 竟哄骗称是感冒药
九派新闻2021-12-27 21:45:51
重庆两幼童被亲生父亲故意坠楼致死案28日将再次开庭审理
新京报2021-12-28 00:40:01
美海军战斗舰暴发新冠疫情
观察者网2021-12-27 14:22:54
美卫星两次接近中国空间站,中方实施“紧急避碰”
环球网2021-12-27 14:43:56
"为防他国占据钓鱼岛" 日本进行相关针对性演练
环球网2021-12-27 11:29:58
戈尔巴乔夫称美国正以北约为幌子建立新帝国
环球网2021-12-27 14:38:10
朱婷起诉5人诽谤 法院:符合相关规定,依法立案
郑州市惠济区人民法院2021-12-28 02:10:18
印度士兵营地内枪杀上司后试图自杀 已被送往医院
海外网2021-12-27 16:20:36
立陶宛士兵偷美军干粮 辩称:美国人不吃,都扔了
海外网2021-12-27 14:14:47
日本空自飞行员:目视中国战机是最紧张的时刻
观察者网2021-12-27 16:08:50