中国科研团队研发新型手术机器人 提升眼科手术精准性

中国科学院自动化研究所研究员边桂彬团队成功研发了一款自主显微眼科手术机器人系统。该系统能够在整个眼内空间实现自主的视网膜下注射与血管注射,提高眼底注射的精确性和安全性,减少医源性损伤。
眼睛软组织结构精细、操作空间狭小,医生在眼内手术中手动操作面临巨大挑战。这款自主显微眼科手术机器人系统构建了从术中三维空间感知、跨尺度精确定位到轨迹精准控制的核心算法模块。与医生手动手术及医生操作机器人进行手术相比,该机器人系统的平均定位误差大幅降低,表现出更高的安全性和精准性。
有专家认为,自主手术机器人系统在眼科手术中的应用能够通过更加智能、精准的操作控制提升手术安全性,为多种眼科疾病的治疗提供新的可能,尤其在远程医疗和极端环境等复杂场景中展现出广阔的应用潜力。相关研究成果已发表于国际学术期刊《科学·机器人学》。
(责任编辑:zx0176)
关闭

北京上线湿冷“魔法攻击” 雨雾增加湿度感寒冷
北京上线湿冷魔法攻击2026-02-26 00:52:11
作家墨宝非宝宣布已于2021年离婚 男方过错方财产分割干净
作家墨宝非宝宣布已于2021年离婚2026-02-25 23:52:45

渡边雄太:将中国队视为要击败的对手 挑战者心态迎战
渡边雄太,将中国队视为要击败的对手2026-02-25 23:49:52

比尔盖茨向基金会员工道歉 承认与爱泼斯坦关系错误
比尔盖茨向基金会员工道歉2026-02-25 20:26:09

京昆高速一隧道内车辆自燃 救援及时现场已疏通
京昆高速一隧道内车辆自燃2026-02-25 23:03:01

“狂飙”至1600元/克大关 年轻人“狂扫”小件金 金价持续上涨
狂飙至1600元/克大关年轻人狂扫小件金2026-02-25 22:46:01

特朗普亲家遭法国“封杀” 大使权限被撤
特朗普亲家遭法国封杀2026-02-25 20:31:46
19国外长发表联合声明:强烈谴责以色列!反对非法控制与定居点扩张
19国外长发表联合声明,强烈谴责以色列2026-02-25 20:34:25
北京上线湿冷“魔法攻击” 雨雾增加湿度感寒冷
北京上线湿冷魔法攻击2026-02-26 00:52:11
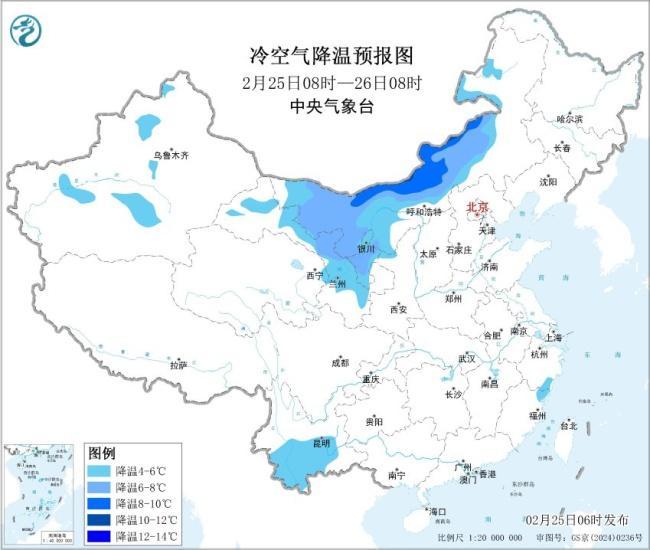
为何二三月更易出现大范围雨雪天气 冷暖空气交汇频繁
为何二三月更易出现大范围雨雪天气2026-02-25 23:13:35

女子回家陆路水路冰路全体验 网友:你和你老公是漂流瓶认识的么
女子回家陆路水路冰路全体验2026-02-25 22:54:08

2026年2月总票房破70亿元 《飞驰人生3》领跑
2026年2月总票房破70亿元2026-02-25 22:56:53

多家金店宣布近期将涨价 市场掀起抢购热潮
多家金店宣布近期将涨价2026-02-25 22:59:47

油价上涨逻辑有变化吗 新一轮调整影响几何
油价上涨逻辑有变化吗2026-02-25 23:00:02

特朗普称美国人求他不要再赢了 虚幻胜利掩盖司法危机
特朗普称美国人求他不要再赢了2026-02-25 15:48:26

中方出台制裁措施后 日本果然急了 利益链震动
中方出台制裁措施后日本果然急了2026-02-25 15:40:07

荷兰外交官涉嫌走私星链设备到伊朗 违禁品风波
荷兰外交官涉嫌走私星链设备到伊朗2026-02-25 16:15:57

美军在以色列部署11架F-22 应对伊朗威胁准备
美军在以色列部署11架F-222026-02-25 20:28:34

韩女子用AI精密策划诱杀致2死1伤 清纯外表下的毒辣手段
韩女子用AI精密策划诱杀致2死1伤2026-02-25 20:20:20

中方反对以任何借口干涉别国内政 回应美议员言论
中方反对以任何借口干涉别国内政2026-02-25 16:10:58

河南当街殴打女孩的夫妻被批捕 全网震怒事件更新
河南当街殴打女孩的夫妻被批捕2026-02-25 22:40:33
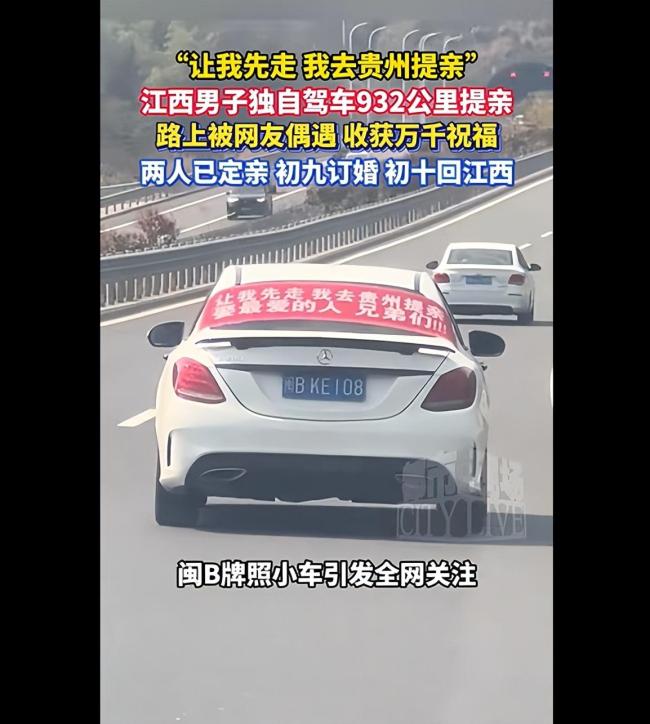
男子独自驾车去提亲收获祝福 千里追爱成功定亲
男子独自驾车去提亲收获祝福2026-02-25 23:05:27
作家墨宝非宝宣布已于2021年离婚 男方过错方财产分割干净
作家墨宝非宝宣布已于2021年离婚2026-02-25 23:52:45

高市早苗政府再次挑衅 挣脱锁链的野心
高市早苗政府再次挑衅2026-02-25 20:42:14

一口气看懂墨西哥黑帮经济账 毒王丧命,比索跌进“毒窟”
一口气看懂墨西哥黑帮经济账2026-02-25 22:13:45

香港游客唱响《我和我的祖国》 爱国情怀感染众人
香港游客唱响我和我的祖国2026-02-25 20:25:42
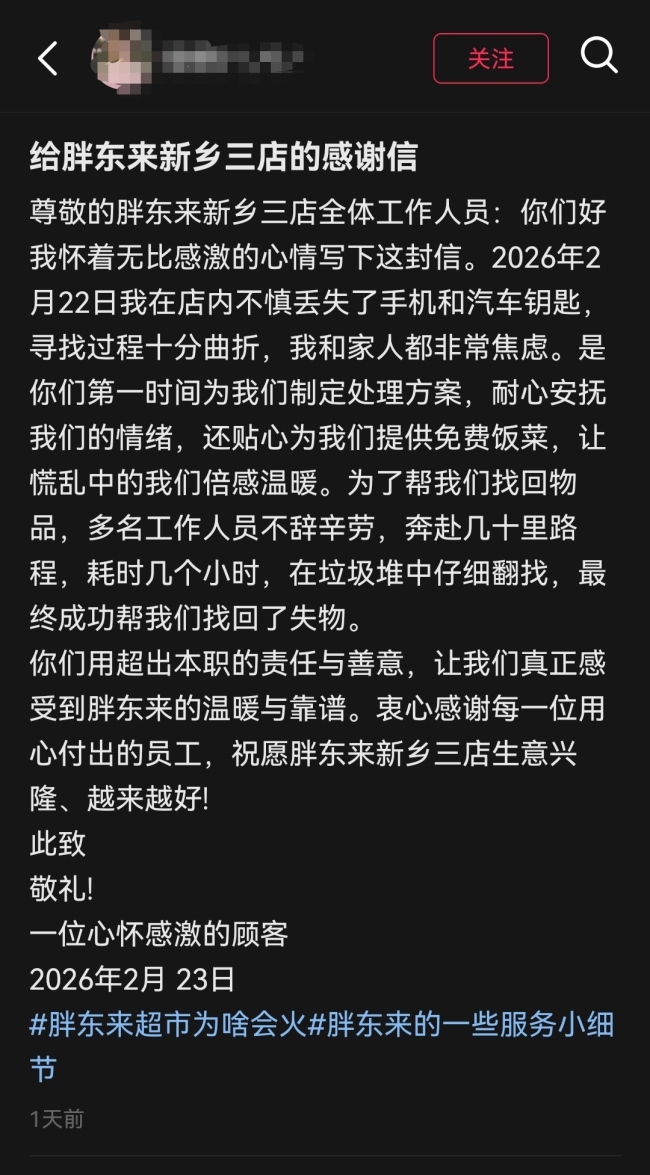
顾客丢失手机钥匙 胖东来员工帮找回 数十公里外寻回遗失物
顾客丢失手机钥匙胖东来员工帮找回2026-02-25 23:42:16

嫌疑人为躲避警方追捕藏身垃圾桶内 环卫工发现后手舞足蹈向警方示意
美环卫工手舞足蹈暗示嫌犯藏身垃圾桶2026-02-25 23:10:53

卓荣泰称陆配民代为“李女士”遭批 轻蔑回应引争议
卓荣泰称陆配民代为李女士遭批2026-02-25 20:14:58

12岁女孩半夜枕头有血 元凶在家 鼻腔干燥所致
12岁女孩半夜枕头有血元凶在家2026-02-25 22:51:38
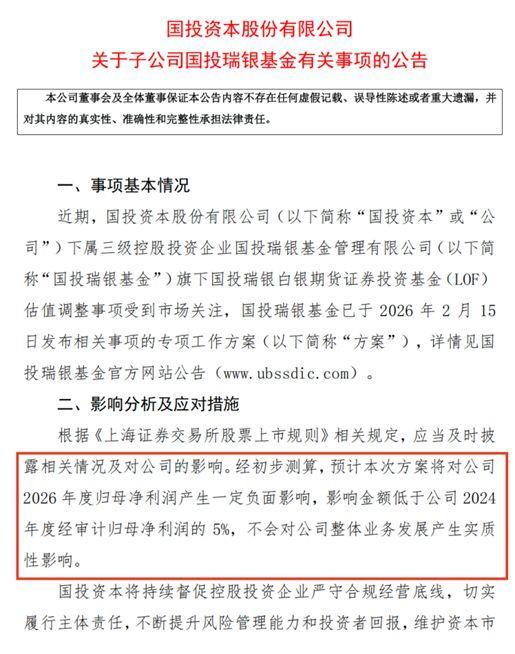
白银LOF九成投资者全额获偿 基金公司展现诚意与决心
白银LOF九成投资者全额获偿2026-02-25 23:08:35

带着诚意!德国总理默茨已抵京 小跑两步出客舱
默茨抵京小跑两步出客舱2026-02-25 20:47:15
渡边雄太:将中国队视为要击败的对手 挑战者心态迎战
渡边雄太,将中国队视为要击败的对手2026-02-25 23:49:52

特朗普发表国情咨文开始自夸 经济成就成焦点
特朗普发表国情咨文开始自夸2026-02-25 20:23:19

西岸扩张、拱火美国对伊朗动武,背后是压力山大的内塔尼亚胡政府 内外交困的执政考验
西岸扩张,拱火美国对伊朗动武,背后是压力山大的内塔尼亚胡政府2026-02-25 15:46:24
相关新闻
中国科研团队研发出AI看病系统 诊断病症有根有据
2月19日凌晨,上海交通大学医学院附属新华医院孙锟教授、余永国教授领衔团队与上海交通大学张娅教授、谢伟迪副教授领衔团队联合研发出一款能看罕见病的人工智能系统
2026-02-19 10:28:48中国科研团队研发出AI看病系统中国科研团队研发出AI看病系统 全球首个“推理过程可追溯”
2026-02-19 08:35:40中国科研团队研发出AI看病系统中国科研团队获重要进展 钠离子电池材料突破
2026-01-13 14:42:12中国科研团队获重要进展马来西亚顶尖机器人科学家移居中国 科研沃土吸引国际人才
2025-08-29 15:48:27马来西亚顶尖机器人科学家移居中国中国科研团队实现常温氢气异裂 光催化策略突破
2025-09-05 09:37:16中国科研团队实现常温氢气异裂中国科研团队发布稀土材料最新成果 攻克电致发光难题
近日,黑龙江大学、清华大学和新加坡国立大学合作完成了一项突破性研究成果,并在《Nature》杂志上正式发表
2025-11-24 12:30:36中国科研团队发布稀土材料最新成果