北京人形机器人创新中心提出WoW 让AI真正理解物理世界

北京人形机器人创新中心提出WoW 让AI真正理解物理世界!北京大学计算机学院、北京人形机器人创新中心以及香港科技大学联合完成了一项突破性研究,于2025年10月发表在arXiv预印本平台。研究团队由北京大学的张尚航教授和唐建教授共同领导,汇集了来自三所顶尖学府的数十位研究人员。这项研究首次让人工智能真正"理解"了物理世界的运作规律,而不仅仅是模仿表面现象。
当我们看到一个球从桌子上滚落时,我们本能地知道它会掉到地上,而不是悬浮在空中。这种对物理世界的直觉理解对人类来说是自然的,但对人工智能来说却一直是个巨大的挑战。现有的AI视频生成模型,比如OpenAI的Sora,虽然能制作出视觉效果惊艳的视频,但它们就像只会画画的艺术家,能画出好看的画面,却不懂得画面背后的物理原理。它们可能会画出物体悬浮在空中、违反重力定律的荒谬场景。
这种局限性的根源在于这些模型是通过观看网络视频来学习的,就像一个从未亲手触摸过球的人,只能通过看别人玩球的视频来"学习"球的特性。这种被动观察的学习方式让AI只能掌握事物的外观,而无法理解事物运作的内在规律。认知科学家让·皮亚杰曾经说过:"要了解一个物体,就必须对它采取行动。"这句话揭示了学习的本质:真正的理解来自于与世界的互动,而不是被动的观察。
基于这个深刻的认知科学洞察,北京大学的研究团队开发了WoW(World-Omniscient World Model)世界模型,这是一个拥有140亿参数的生成式世界模型。与传统模型最大的不同在于,WoW是通过200万个真实机器人互动轨迹进行训练的。这些数据涵盖了5275个不同任务和12种不同类型的机器人,就像让AI亲手体验了无数次物理互动,从而真正学会了重力、碰撞、惯性等物理定律。

中国启动聚变领域国际科学计划 聚力点燃“人造太阳”

A股回调是增持良机吗 多数券商看好后市

民进党当局公告日本5地核食管制解禁 引发岛内哗然疑虑

首个报道南京大屠杀的记者王火去世 百岁人生见证历史

专家:高市错误言论暗藏三大意图 挑战中方底线
A股回调是增持良机吗 多数券商看好后市
日本夺岛方案“揭秘” 自卫队三套计划曝光

韩国总统希望早日访华 推进中韩合作

中国军队坚定捍卫国家主权 维护地区和平稳定

上周末我国多领域迎来新突破 捷报频传
民进党当局公告日本5地核食管制解禁 引发岛内哗然疑虑

最新!订单爆棚的公司名单来了,12家获机构扎堆关注 业绩增长催化剂

中国无人驾驶重卡开进英国最大港口 科技风景线闪耀菲力斯杜港

石破茂再批高市早苗 外交政策遭严厉批评

美国为什么从日本撤走“堤丰”中程导弹系统? 局势突变引发撤离
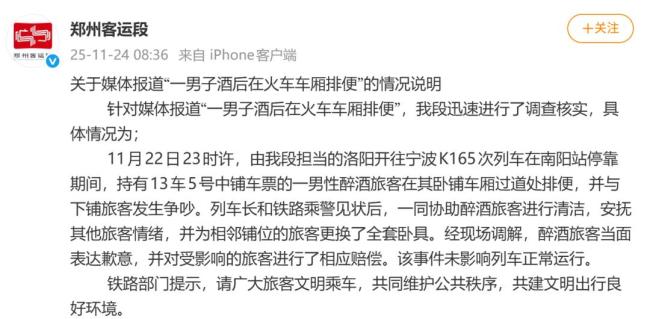
男子卧铺车厢排便旅客鞋子箱子遭殃 醉酒惹祸端

官方通报三无飞机问题 面条厂造飞机暗藏风险

张家界荒野求生决赛开始 14强选手迎终极挑战

日本民众批评高市早苗 要求其辞职平息局势

加总理:即使没有美国世界也可以运转 G20共识仍具分量

中国004航母核动力真相曝光 战斗力惊人 或成全球最大航母

高市早苗被拒进入日本相扑擂台 传统规定引发争议
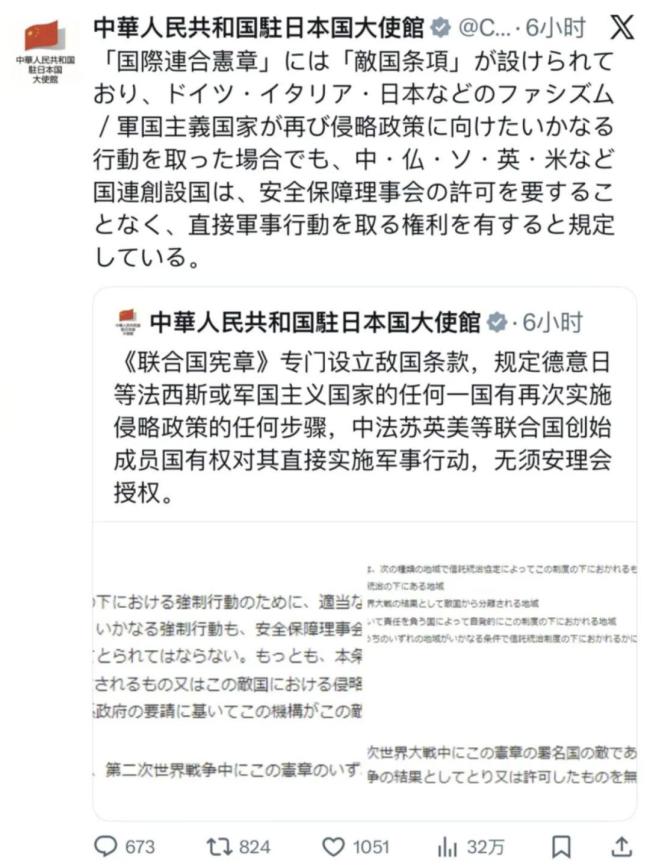
日媒宣传“敌国条款”已废除,事实真是如此吗? 中国官方重申条款真相
美发布“委领空预警”是要动手了吗 历史重演?

特朗普猛烈抨击乌克兰领导层 感激危机背后的博弈
中国启动聚变领域国际科学计划 聚力点燃“人造太阳”

湖人再胜爵士 客场险胜迎4连胜

日本为啥急于重启柏崎刈羽核电站 能源危机下的无奈选择

英伟达力推对华芯片销售 中美关系缓和现曙光

公然挑衅,执意玩火!高市早苗挑衅言论会造成什么样的恶果?

公然挑衅,执意玩火!高市早苗挑衅言论会造成什么样的恶果?

美国专家批评高市错误言论 转移国内注意力

日本一工厂发生火灾火势无法控制 持续8小时未减弱

美国宇航局发布神秘星际天体新图像,揭示了其真实本质,成功击破持续数周的网络谣言!

日本发生大火今晨仍未被扑灭 火势持续蔓延
相关新闻
泰王参观北京人形机器人创新中心 展现浓厚兴趣
2025-11-17 20:29:43泰王参观北京人形机器人创新中心北京人形机器人创新中心开源运控框架Tien Kung-Lab 填补行业空白
7月7日,北京人形机器人创新中心发布了开源运动控制框架Tien Kung-Lab,将机器人马拉松冠军的运控算法面向行业开源,填补了高性能人形机器人运动控制框架在开源领域的空白
2025-07-08 09:00:48北京人形机器人创新中心开源运控框架TienKung-Lab新加坡总理黄循财参访北京人形机器人创新中心,市长殷勇陪同 共探机器人技术前沿
2025-06-24 14:52:40新加坡总理黄循财参访北京人形机器人创新中心世界人形机器人运动会为创新找准突破口
2025世界人形机器人运动会,在机器人异彩纷呈的表现背后,是相关技术的不断迭代更新。
2025-08-18 07:50:28世界人形机器人运动会为创新找准突破口新加坡总理黄循财参观北京人形机器人创新中心,点赞中国新兴技术 仿生科技引赞叹
2025-06-25 11:37:20新加坡总理黄循财参观北京人形机器人创新中心北京将迎来机器人领域两大盛会 聚焦人形机器人竞技
2025-07-21 23:19:05北京将迎来机器人领域两大盛会