北京人形机器人创新中心开源运控框架Tien Kung-Lab 填补行业空白

7月7日,北京人形机器人创新中心发布了开源运动控制框架Tien Kung-Lab,将机器人马拉松冠军的运控算法面向行业开源,填补了高性能人形机器人运动控制框架在开源领域的空白,为工业、物流和特种作业等高复杂环境下的规模化应用提供了核心基础技术支撑。
Tien Kung-Lab是一套基于Isaaclab开发的开源强化学习运动控制算法框架,融合了前沿的强化学习技术和人体运动数据,旨在让人形机器人实现自然、高效、稳定的运动控制。此前,在全球首届人形机器人马拉松比赛中,搭载该运控算法的天工Ultra以2时40分42秒跑完21.0975公里,夺得全球首个人形机器人马拉松冠军。
该方法首次结合了模仿学习与强化学习的优势,基于Adversarial Motion Prior(AMP)风格化奖励机制,通过引入动作捕捉数据作为先验,让人形机器人在走路、跑步等移动中具备面对复杂地形的高稳定性和高泛化性,同时保留了与人类高度相似的姿态。Tien Kung-Lab所开源的针对人形机器人的步态奖励,可让开发者快速训练出走路、跑步等策略。
为了帮助开发者更方便地进行感知策略训练,此次开源的算法框架改进了相关的光线追踪技术,实现了训练环境中深度图和激光雷达点云的快速准确获取,使仿真环境下从感知到运动的端到端训练成为可能。此外,Tien Kung-Lab支持在高保真物理引擎MuJoCo上进行Sim2Sim交叉验证,实现从训练到交叉验证的无缝迁移。
目前,Tien Kung-Lab已在天工2.0全尺寸人形机器人上实现了具备高泛化性能的行走与奔跑,并在Open X-Humanoid开源社区、Github、Gitee等平台开放下载,加速了全球人形机器人运动控制算法的研发迭代与生态构建。

小区出租屋隐藏涉诈机房 警方侦破 “猫池”设备被端

佛山顺德:防疫攻坚 韧性治理 全民战疫彰显城市韧性

吹空调一周突然白肺,夏季警惕嗜肺军团菌 空调清洁不可忽视

加沙的生死挣扎 儿童饥饿干渴日益恶化

莫迪会为了普京得罪特朗普吗 印度石油政策不变

媒体:美企成特朗普关税最大纳税人 全球贸易体系面临危机
吹空调一周突然白肺,夏季警惕嗜肺军团菌 空调清洁不可忽视

解放军演练登陆作战 画面披露 展现海陆空协同作战能力
新疆8月下雪 阿勒泰迎来首场秋雪

日本股市一度暴跌900点 美股大跌拖累日股

宜家中国宣布入驻京东平台 覆盖全国301城配送

韩外长表态:既要与美日合作,也要与中国保持良好关系 寻求地缘政治平衡

6岁男童小区内被犬只撕咬下体,医院:已完成清创缝合手术

福建舰入列进入最后攻坚时刻 关键画面披露!
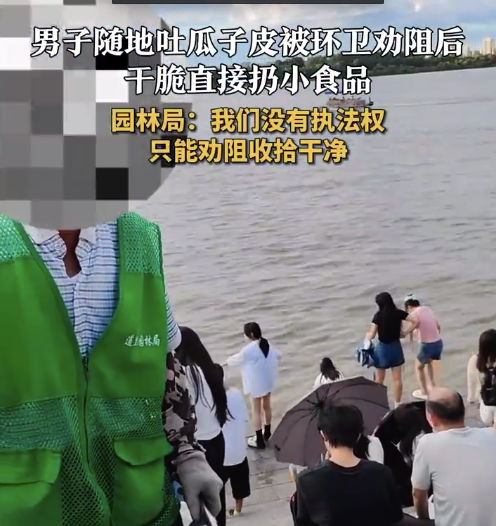
男子随地吐瓜子皮环卫工劝阻被怼 还说谁规定不准

男孩高考完做暑假工 悄悄买金戒指给妈妈送上惊喜

天津启动市防汛四级应急响应 应对暴雨来袭
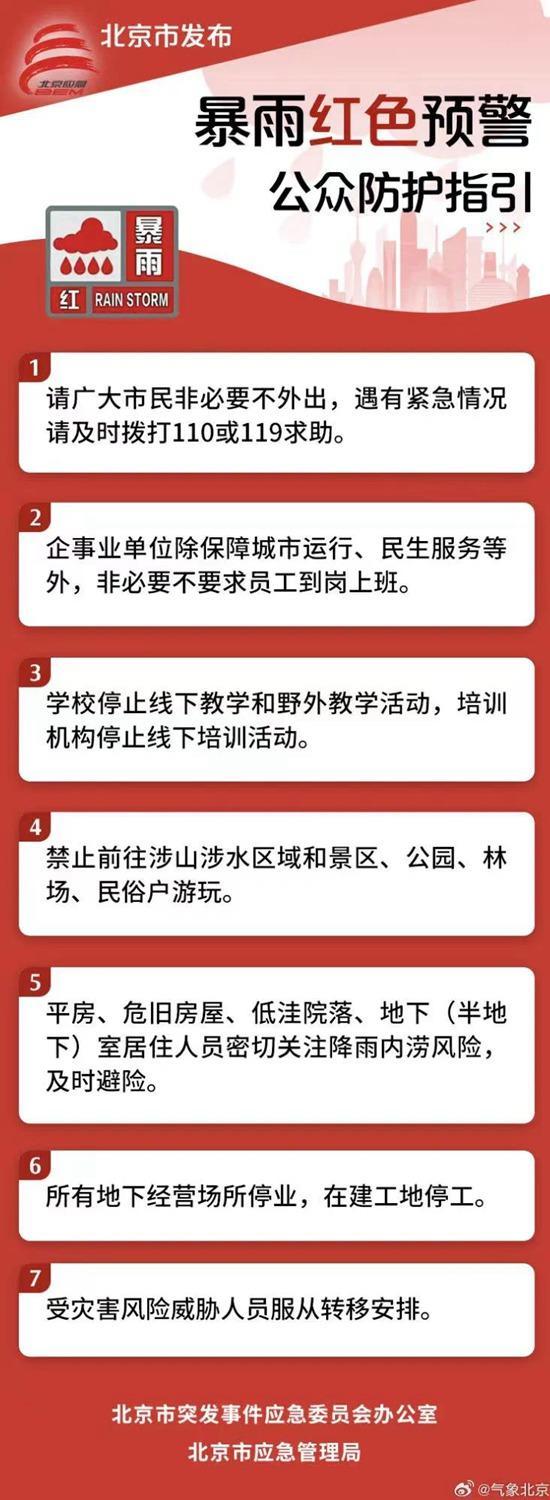
北京再度拉响暴雨红色预警 最强降雨来袭

有医美机构注射的竟是“它”?部分医美机构水光针根本不能打脸上

老人采药跌落崖底 消防绳索救援 紧急行动展开!
王大雷为扔队长袖标致歉 情绪激动所致

中印俄巴有联手应对美关税的可能吗 金砖合力共抗霸权
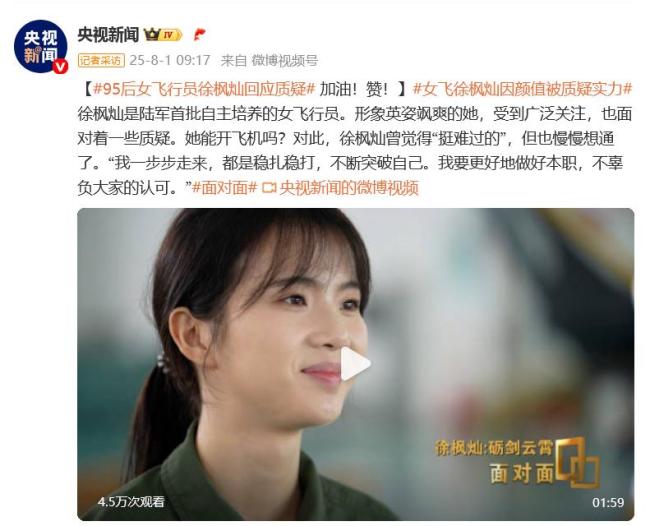
徐枫灿用实力回应质疑 稳扎稳打突破自我

航拍加沙民众领粮:人群密集似蚂蚁!
“东风-27”导弹,从西北内陆基地升空,以15马赫速度冲出大气层 美军航母心生畏惧
小区出租屋隐藏涉诈机房 警方侦破 “猫池”设备被端

公司以迟到为借口辞退员工 法院:缺乏依据构成违法
佛山顺德:防疫攻坚 韧性治理 全民战疫彰显城市韧性

专家:中国战机“心脏”将更加澎湃 撕裂西方技术垄断

印度硬刚特朗普:拒绝停购廉价俄油,坚持能源自主权

乌克兰外长为何猛批哈马斯?原因曝光

近期北京仍是多雨模式 山区谨防地质灾害

巴西前总统支持者举行抗议集会:声援前总统博索纳罗,怒斥最高法院
亲生女不管老人却争房产败诉 长期照料者胜诉

黄国昌支持柯文哲有关民代任期安排 贯彻两年条款
相关新闻
新加坡总理黄循财参访北京人形机器人创新中心,市长殷勇陪同 共探机器人技术前沿
2025-06-24 14:52:40新加坡总理黄循财参访北京人形机器人创新中心新加坡总理黄循财参观北京人形机器人创新中心,点赞中国新兴技术 仿生科技引赞叹
2025-06-25 11:37:20新加坡总理黄循财参观北京人形机器人创新中心北京将迎来机器人领域两大盛会 聚焦人形机器人竞技
2025-07-21 23:19:05北京将迎来机器人领域两大盛会人形机器人“擂台赛”开打
今年以来,人形机器人的加速迭代不断刷新我们对具身智能领域的认知,每一个新技能的解锁,都是技术水平的又一次跨越。
2025-05-26 08:57:50人形机器人“擂台赛”开打北京半程马拉松即将开跑 人形机器人同场竞技
4月19日,2025北京亦庄半程马拉松暨人形机器人半程马拉松在北京亦庄举行。天工队选手天工Ultra在比赛起点准备。逐日行者队选手逐日行者和小顽童队选手松延动力N2积极参与比赛
2025-04-19 10:41:28北京半程马拉松即将开跑湖北:加快人形机器人产业发展
近年来,湖北省加大对科技创新主体引培,依托省内强大的科研力量和产业基础,组织省内多所高校、科研院所、企业进行科研攻关,以“用”为导向,全力拓展应用场景,促进人形机器人产业创新发展。
2025-03-25 07:43:28湖北:加快人形机器人产业发展