飞船与空间站交会对接为何走走停停 揭秘关键技术背后的奥秘
交会对接是建设中国空间站的关键技术,它使两个航天器在同一时间、同一位置以相同速度和姿态会合并在结构上连为一个整体。这一过程分为交会和对接两个阶段。飞船在奔赴空间站时会“走走停停”,这是为了确保安全和准确对接。

在交会阶段,飞船追踪空间站的过程中,通过变轨达到与空间站相同的轨道高度后,两飞行器相对距离和速度保持不变,飞船相对于空间站来说就“停泊”了。这种“停泊”是由轨道规律保证的,即被动安全,只要不做动作,就没有相撞风险。设置停泊点主要用于以下操作或场景:

- 切换相对测量敏感器:从数百公里追踪至对接过程中,很难由一套设备从头测到底。因此,在与空间站相对距离不变且安全的停泊点进行不同测量距离的设备切换是最优选择。 - 故障处置:在停泊点可以等待处理敏感器等典型故障,有些交会方案将停泊点作为全系统状态检查的点,确认一切正常才放行。 - 对接时间调整:如轨控执行有误差,则飞行时间与预计也会有偏差,设置停泊点可以“吃掉”此前的飞行时间误差,以保证后续步骤按预定时间计划执行。 - 解决光学敏感器受阳光干扰的问题:当阳光晃眼时在停泊点等待,太阳转过去后再继续前进。停泊点可以设置在空间站的后方或前方,根据需要进行升降轨操作。

交会有自动与手动两种模式。高精度自动控制条件下,手动交会仍然保留,这是因为人眼精准的立体视觉和人脑-手指精细的操控能力使得航天员经过训练后可以达到极高的观测和控制精度。手动交会的一大优势在于控制精度好,并且人在现场的临机处置能力更强。早期由于技术水平限制,自控不如人控精度高。当代虽然自动控制精度足够高且稳定,但人控作为一种冗余手段被保留下来。

快速交会技术的发展使得交会对接时间大大缩短。2021年6月17日,神舟十二号载人飞船与天和核心舱形成组合体,全程时长从两天左右缩短至6.5小时。实现快速交会的关键因素包括空间站调相及轨道外推预测精度高、火箭入轨精度高、测定轨实时精确、实时轨控规划与计算精准以及轨控精度足够高。这些条件的提升和协同保障使得快速交会成为可能。
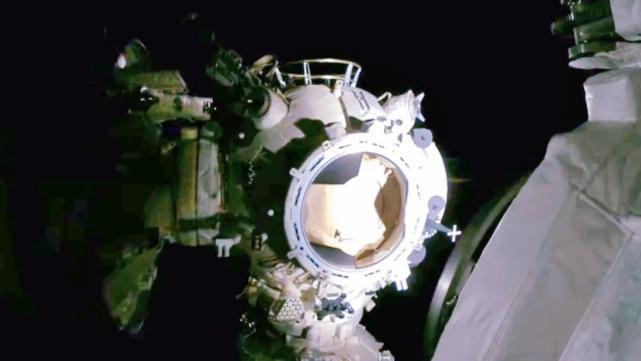
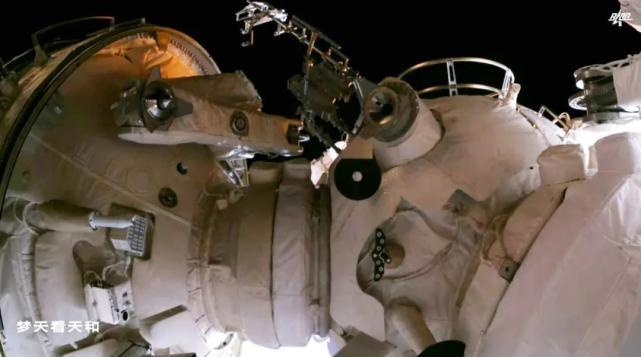
对接阶段是从单个航天器到组合体的过程,主要包括接触、接纳和几何位置校正,缓冲并消耗碰撞能量,机械连接三个步骤。首先,两个飞行器的对接机构相互接触后,消除初始偏差,让双方的机械装置相互接纳并校正位置关系。其次,高速飞行的大质量航天器即使以较小速度相互接触,冲击能量也很大,因此需要配置缓冲和耗能装置。最后,两对接端面被拉近、靠拢,通过机械锁系刚性连接为一体,实现电路、液路连通,载人环境贯通。
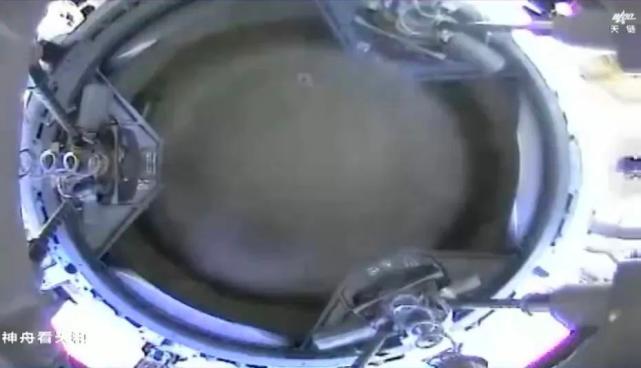
为了保证对接过程的安全,对接机构上配置的缓冲阻尼系统隔离了两个飞行器本身,实际起到的效果相当于以这套系统的等效动力学特性去撞击目标。对接接触后两航天器均要停止姿态控制,组合体处于自由漂移状态,缓冲系统只需将对接撞击能量消耗即可。此外,对接机构还需要具备承受较大偏心翻转载荷并吸收该方向输入能量的能力。
交会对接是一个复杂的系统工程,涉及多个环节和技术,通过控制核心技术实现总体最优设计,为空间设施建设提供了有力支持。

多地密集开启新一轮抢人计划 真金白银吸引青年人才
分析师:GTC大会将提振对英伟达信心 创新成果引关注

赵露思陈伟霆许我耀眼预约破150万 粉丝期待高涨

爱国商人霍英东曾遭美西方打压40年 家国情怀与商业逻辑的碰撞

瘦人不会得脂肪肝?错!防治脂肪肝远离七大误区 改变生活方式是关键
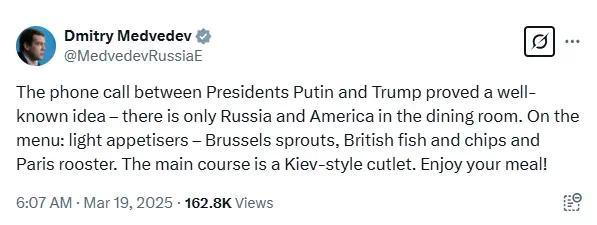
梅德韦杰夫用菜品比喻欧盟和英法乌

美股周二全线收跌 科技股普遍下挫

名嘴:特朗普根本是假的和平主义者 中东战火再燃玄机何在

乌军撤离库尔斯克遭遇了什么 重装备损失严重

周杰伦在周杰伦模仿大赛没得第一 网友:周杰伦不会变老,只会变多

牛弹琴:美俄要精诚合作了 特朗普普京通话成果显著

加拿大总理访欧给美国脸色 寻求盟友支持
中方强烈谴责以色列再次挑起战火 呼吁立即停止军事行动
分析师:GTC大会将提振对英伟达信心 创新成果引关注

特朗普普京打完电话 美俄要精诚合作 开启全面合作新篇章

幼童坠河 母亲催促自己儿子下河救人

泽连斯基:想了解俄美元首通话细节,我不信任普京
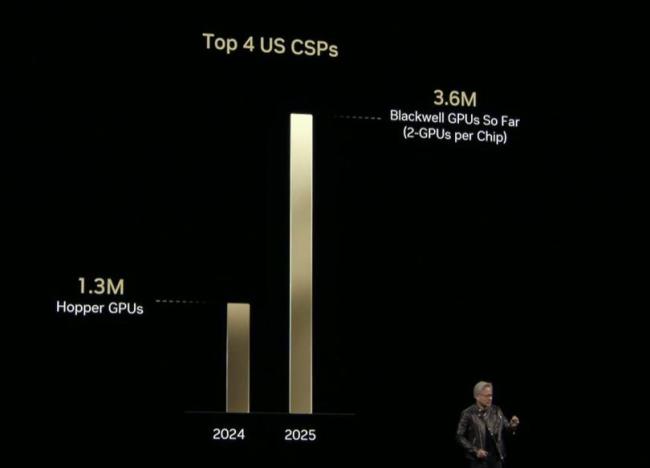
黄仁勋公布一年一更的芯片路线图 技术蓝图再升级
女子地铁上突然被男孩行礼,网友:人怎么能外向到这种程度!
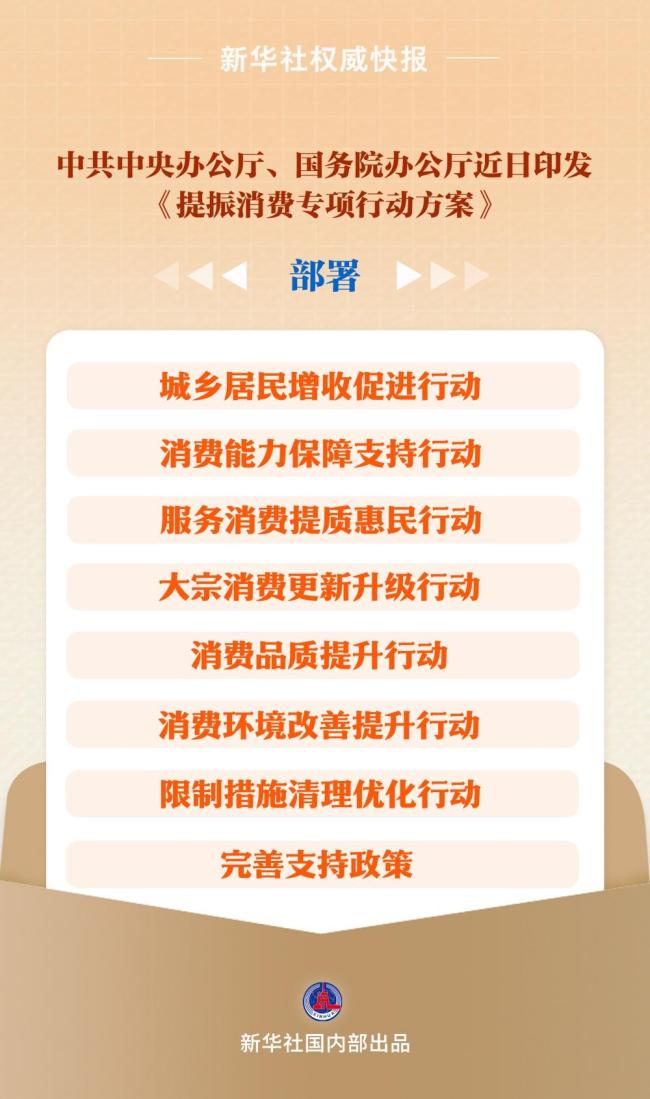
工资、住房、育儿都在这里!提振消费“30条“来了:全面促进居民增收

巴以冲突局势为何再次急转直下 和谈成果一夜归零?
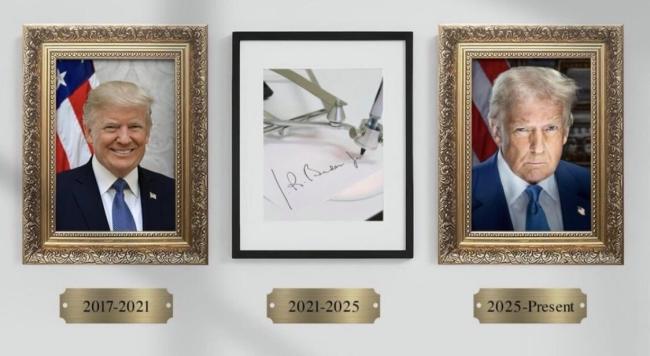
拜登肖像照被自动签名笔取代 特朗普讽刺引发讨论
赵露思陈伟霆许我耀眼预约破150万 粉丝期待高涨

2024年北京海关截获外来物种869种次,同比增长2.1倍 “异宠”风险加剧

男童尿急母亲让其尿入饭店杯具中

假期打算自驾出行的朋友注意啦,这8天免费! 清明劳动节免通行费
男子为涨粉造谣“救人被撞”?警方:行拘5天 网络谣言毒瘤再现

已解放库尔斯克31个定居点!俄公布缴获武器画面 乌军补给线被切断

英法此时威胁俄罗斯有何意味 虚张声势?

王楚钦说一切都很好也会更好 夺冠展现强大实力
女生误诊淋巴瘤后确诊骨肉瘤 在生日当天签下截肢手术同意书

解放军“登陆神器”现身背后 揭示未来动向

李嘉诚卖港口 香港两任特首发声 交易或有转机
多地密集开启新一轮抢人计划 真金白银吸引青年人才
台湾大爷遇大陆游客 直呼:祖国的
相关新闻
神舟十九号与空间站组合体完成自主快速交会对接
刚刚,神舟十九号载人飞船与空间站组合体完成自主快速交会对接。按任务计划,3名航天员随后将从神舟十九号载人飞船进入空间站天和核心舱
2024-10-30 11:27:32神舟十九号载人飞船与空间站组合体完成自主快速交会对接全流程!多视角回顾天舟八号与空间站交会对接
北京时间2024年11月16日2时32分,天舟八号货运飞船成功对接于空间站天和核心舱后向端口。交会对接完成后,天舟八号将转入组合体飞行段。
2024-11-16 08:19:09全流程!多视角回顾天舟八号与空间站交会对接为何我国要夜间发射神舟飞船 精准对接需求
10月29日,神舟十九号载人飞行任务新闻发布会在公开场合举行,参与此次任务的三名航天员亮相,并宣布了飞船发射时间。随后,神舟十九号飞船于凌晨4点多成功发射升空。不少人好奇为何选择在太阳未升起时发射
2024-10-30 13:25:57为何我国要夜间发射神舟飞船俄货运飞船与国际空间站对接 顺利完成自动对接
俄罗斯国家航天集团在其官网上宣布,莫斯科时间23日17时31分(北京时间22时31分),俄“进步MS-29”货运飞船与国际空间站的俄罗斯舱段“搜索”号小型研究舱成功实现自动对接
2024-11-25 09:48:06俄货运飞船与国际空间站对接俄罗斯“进步MS-29”货运飞船与国际空间站对接
俄罗斯国家航天集团11月23日在其官网发布消息说,俄“进步MS-29”货运飞船当天与国际空间站完成对接。
2024-11-24 07:47:12俄罗斯“进步MS-29”货运飞船与国际空间站对接现场:俄飞船与国际空间站完成对接 飞船载有俄美3名宇航员
2024-09-12 09:54:55现场:俄飞船与国际空间站完成对接