飞船与空间站交会对接为何走走停停 揭秘关键技术背后的奥秘
交会对接是建设中国空间站的关键技术,它使两个航天器在同一时间、同一位置以相同速度和姿态会合并在结构上连为一个整体。这一过程分为交会和对接两个阶段。飞船在奔赴空间站时会“走走停停”,这是为了确保安全和准确对接。
在交会阶段,飞船追踪空间站的过程中,通过变轨达到与空间站相同的轨道高度后,两飞行器相对距离和速度保持不变,飞船相对于空间站来说就“停泊”了。这种“停泊”是由轨道规律保证的,即被动安全,只要不做动作,就没有相撞风险。设置停泊点主要用于以下操作或场景:
- 切换相对测量敏感器:从数百公里追踪至对接过程中,很难由一套设备从头测到底。因此,在与空间站相对距离不变且安全的停泊点进行不同测量距离的设备切换是最优选择。 - 故障处置:在停泊点可以等待处理敏感器等典型故障,有些交会方案将停泊点作为全系统状态检查的点,确认一切正常才放行。 - 对接时间调整:如轨控执行有误差,则飞行时间与预计也会有偏差,设置停泊点可以“吃掉”此前的飞行时间误差,以保证后续步骤按预定时间计划执行。 - 解决光学敏感器受阳光干扰的问题:当阳光晃眼时在停泊点等待,太阳转过去后再继续前进。停泊点可以设置在空间站的后方或前方,根据需要进行升降轨操作。
交会有自动与手动两种模式。高精度自动控制条件下,手动交会仍然保留,这是因为人眼精准的立体视觉和人脑-手指精细的操控能力使得航天员经过训练后可以达到极高的观测和控制精度。手动交会的一大优势在于控制精度好,并且人在现场的临机处置能力更强。早期由于技术水平限制,自控不如人控精度高。当代虽然自动控制精度足够高且稳定,但人控作为一种冗余手段被保留下来。
马斯克发文力荐《1493》 全球化再思考
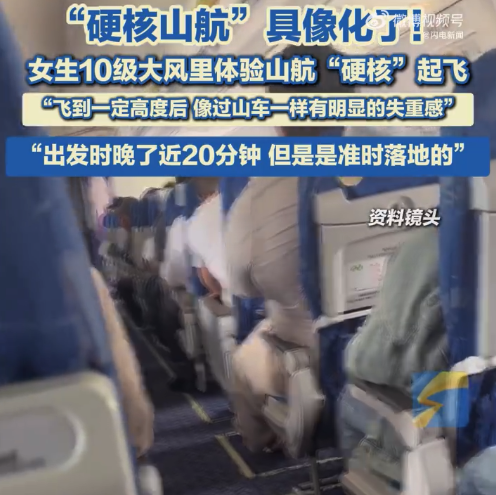
大雨大雪后山航又挑战大风里起飞 网友:果然没有山航飞不了的天儿

女子遇“杀猪盘”电诈 民警耐心劝阻挽回750万损失

一名乌克兰F-16飞行员死亡 泽连斯基誓言回应

河南驻马店发布一批人事任免 涉及多部门调整

家属讲述司机泄愤撞死一家三口案细节 悲剧国庆夜
马斯克发文力荐《1493》 全球化再思考

媒体:欧洲版“星链”前路漫漫 自主之路挑战重重

美方纠错的步子应该迈得更大一些 关税松动信号显现
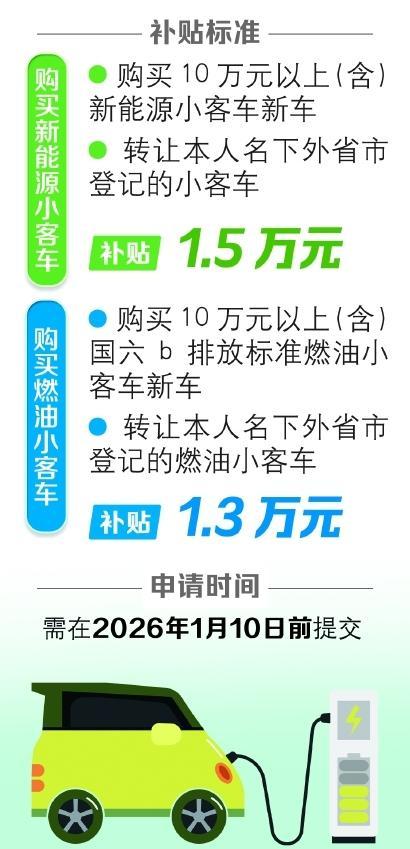
以旧换新政策又加码 外牌旧车纳入补贴
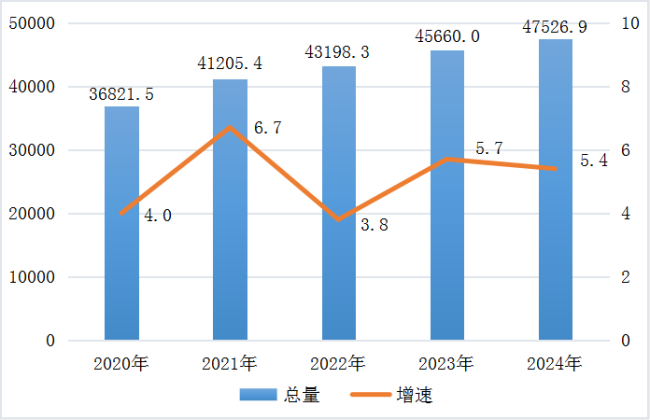
河北省2024年国民经济和社会发展统计公报

双色球“井喷”34注一等奖 江苏独揽24注 常州彩民中1.09亿巨奖

反制美“对等关税”最好办法是什么 坚定推进高水平开放
日本人大幅抛售美国国债?自民党高官表态
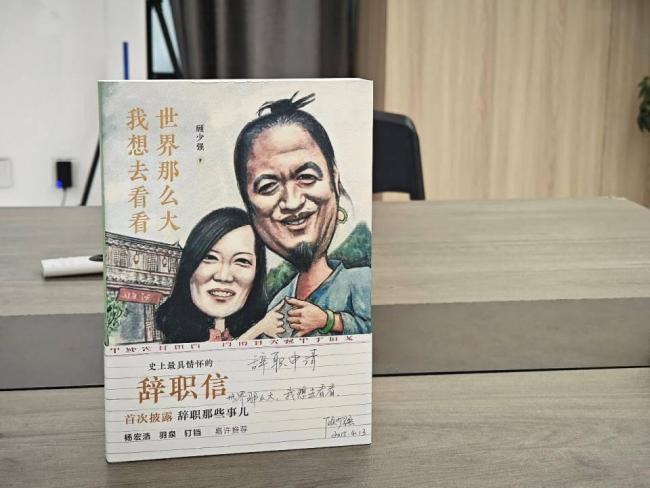
辞职看世界女教师回应回到原点 灵魂依旧自由

伊朗与美国首轮间接谈判结束 会谈将在下周继续进行

大阪世博会中国馆闪亮登场 展现东方智慧与绿色未来
为啥4月有这么极端的大风 历史罕见持续性强
大雨大雪后山航又挑战大风里起飞 网友:果然没有山航飞不了的天儿

超3万款母婴产品可享江西育儿补贴 全国首个“母婴政府消费券”推出

美国进口订单出现崩溃迹象 关税冲击波引发预订冻结

曾志伟72岁生日摆素食宴,数百人到场

离开中国后,“甲亢哥”:想念“卤鹅哥” 会带他去美国 真挚友情跨越国界

美伊首轮间接谈判结束 建设性对话继续
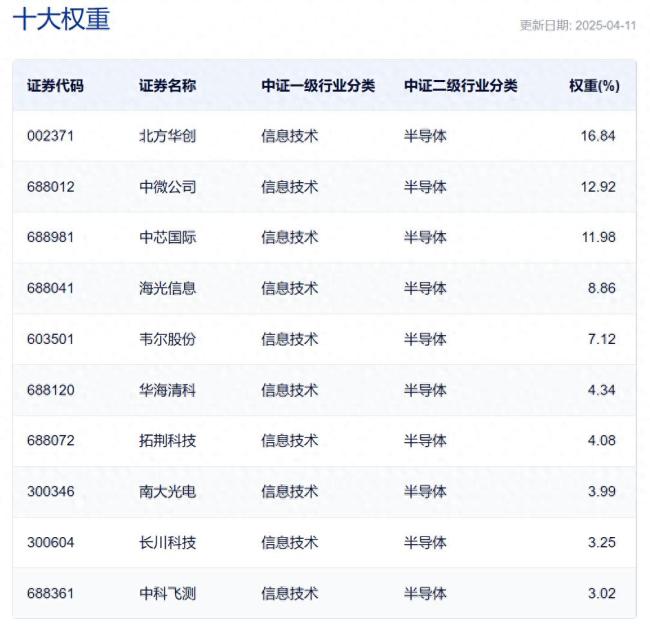
国产半导体设备“攻守之势异也” 政策利好推动产业发展
欧洲芯片厂齐声警告加税风暴 恐雪上加霜

关税救不了美国制造 违背经济规律

默茨称将限制移民德国人数 减轻基础设施压力

美国高管一家5口坠机遇难 美直升机无记录仪 事故调查面临挑战

当地回应越野车涉水游玩致2死 官方暂未发布详情

辟谣美国建厂!百余股火速回应稳信心:关税影响有限 澄清声明稳定市场情绪

别人背上山的两箱矿泉水,竟被一女驴友故意推到山下

俄罗斯最新涉华表态 中俄石油合作前景广阔

三河牌匾变色疑因领导说要脱俗 商户反映整改压力大
女子遇“杀猪盘”电诈 民警耐心劝阻挽回750万损失
相关新闻
神舟十九号与空间站组合体完成自主快速交会对接
刚刚,神舟十九号载人飞船与空间站组合体完成自主快速交会对接。按任务计划,3名航天员随后将从神舟十九号载人飞船进入空间站天和核心舱
2024-10-30 11:27:32神舟十九号载人飞船与空间站组合体完成自主快速交会对接全流程!多视角回顾天舟八号与空间站交会对接
北京时间2024年11月16日2时32分,天舟八号货运飞船成功对接于空间站天和核心舱后向端口。交会对接完成后,天舟八号将转入组合体飞行段。
2024-11-16 08:19:09全流程!多视角回顾天舟八号与空间站交会对接为何我国要夜间发射神舟飞船 精准对接需求
10月29日,神舟十九号载人飞行任务新闻发布会在公开场合举行,参与此次任务的三名航天员亮相,并宣布了飞船发射时间。随后,神舟十九号飞船于凌晨4点多成功发射升空。不少人好奇为何选择在太阳未升起时发射
2024-10-30 13:25:57为何我国要夜间发射神舟飞船俄货运飞船与国际空间站对接 顺利完成自动对接
俄罗斯国家航天集团在其官网上宣布,莫斯科时间23日17时31分(北京时间22时31分),俄“进步MS-29”货运飞船与国际空间站的俄罗斯舱段“搜索”号小型研究舱成功实现自动对接
2024-11-25 09:48:06俄货运飞船与国际空间站对接俄罗斯“进步MS-29”货运飞船与国际空间站对接
俄罗斯国家航天集团11月23日在其官网发布消息说,俄“进步MS-29”货运飞船当天与国际空间站完成对接。
2024-11-24 07:47:12俄罗斯“进步MS-29”货运飞船与国际空间站对接神十九与空间站完成对接 航天员顺利进驻
2024-10-30 11:27:00神十九与空间站完成对接