中国首个“星际矿工”诞生 太空资源开发迈出关键一步
随着地球资源的日益枯竭,人类开始将目光投向太空,尤其是月球、火星和近地小行星等蕴藏丰富矿产资源的地方。太空采矿这一以往只在科幻小说和电影中出现的场景正在逐步变为现实。
中国矿业大学刘新华教授团队研发出国内首台多功能太空采矿机器人。这款机器人不同于当下流行的人形机器人或机器狗,其基本形态为六足模式,包括三个轮足和三个爪足。这样的设计主要是为了适应太空中的微重力环境。太空采矿机器人需要在地外星体上完成地质勘探和矿物采集任务,钻探是必备技能。然而,在低重力环境下,如何让钻头顺利钻进星体表面成为一大难题。为此,科研团队模拟昆虫的爪刺结构,为机器人设计了特殊的爪刺足,以增强其附着和抓地能力。目前,该机器人原型机已申请专利并通过初审。
为了让太空采矿机器人练就“十八般武艺”,刘新华教授团队搭建了一个特殊的训练场,主要模拟近地小行星表面的风化程度和微重力环境。经过不断训练,机器人已经可以根据工作环境调整自身结构形状,适应复杂地表。此外,该机器人还需要在中国矿业大学深地工程智能建造与健康运维全国重点实验室进行进一步训练,这里可以精准模拟月球表面极端环境,包括六分之一G重力场、超高真空环境以及巨大的昼夜温差。通过这些实验,科研人员能够更准确地掌握月球地层特性,为未来实际开采做好准备。
开发太空资源不仅关乎科技竞争,更是未来人类文明可持续发展的希望所在。基于现有空间科学技术、航空航天技术和采矿技术,人类有望在未来几十年内实现试验性开采近地星体上的太空资源。月球作为距离地球最近且资源丰富的天体,已成为全球科研投入的重点对象。除了月球,太阳系中数量众多的小行星也蕴藏着丰富的矿产资源,其中近地小行星因距离地球较近而具有较高的开采价值。目前,全球科技界已在地外天体钻孔技术、太空中原位资源利用等多个关键技术上取得大量成果。太空3D打印等新兴技术的发展,使人们对于在太空制造组装采矿装备及利用太空资源充满期待。

重庆回应大量矿泉水倒入长江 祈福行为不被提倡

火箭落后雷霆16个胜场 创历史最大胜场差纪录

本赛季库里罚球命中率93.3% 稳居榜首

伊朗与美国首轮间接谈判结束 会谈将在下周继续进行

陈雨菲分享和樊振东互关经历 从内向到互动

离开中国后,“甲亢哥”:想念“卤鹅哥” 会带他去美国 真挚友情跨越国界
欧洲芯片厂齐声警告加税风暴 恐雪上加霜

辟谣美国建厂!百余股火速回应稳信心:关税影响有限 澄清声明稳定市场情绪

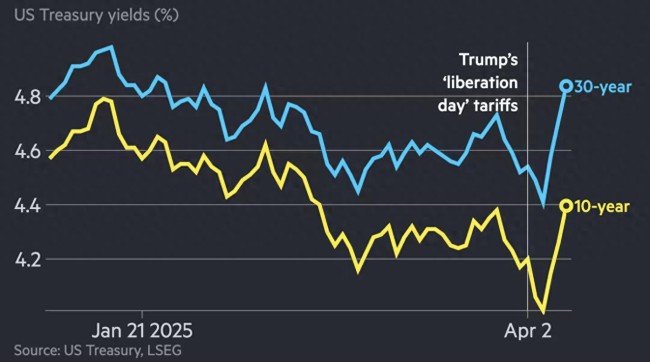
美国进口订单出现崩溃迹象 关税冲击波引发预订冻结
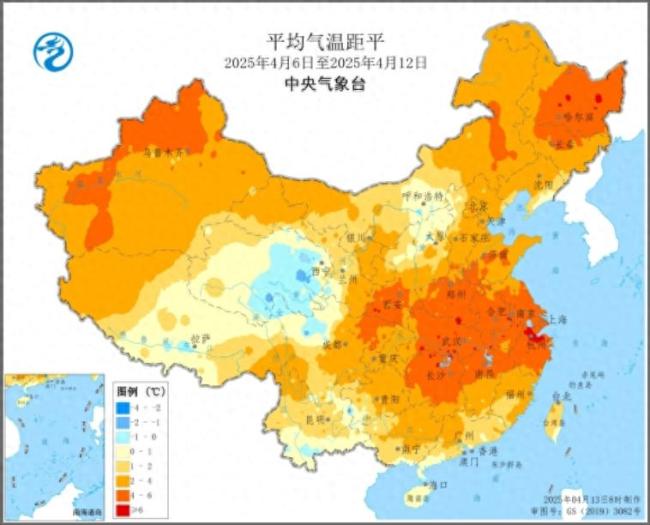
未来十天江南华南将有明显降雨过程 利于农业生产用水补充

女子替去世男友还债60万,还照顾前男友家庭,当事人:不能让他背负失信骂名离开 9年坚守情义无价

热搜第一!人民币,大消息 跨境使用显著增长

杨幂刘诗诗时隔16年再合作 诗幂同框引热议
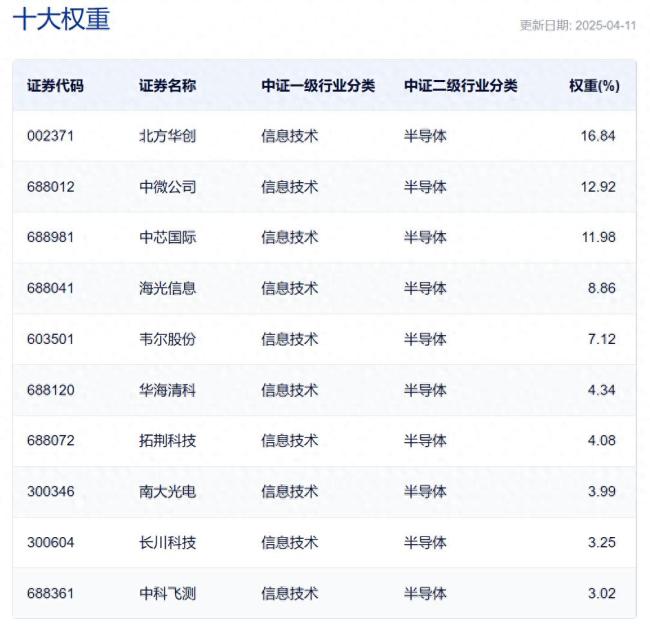
国产半导体设备“攻守之势异也” 政策利好推动产业发展

俄罗斯最新涉华表态 中俄石油合作前景广阔

反制美“对等关税”最好办法是什么 坚定推进高水平开放

何运晨领悟“理想offer”,职场新进阶
荣昌卤鹅爆火后遭遇李鬼 正品与仿冒之争

媒体:欧洲版“星链”前路漫漫 自主之路挑战重重

美国高管一家5口坠机遇难 美直升机无记录仪 事故调查面临挑战

美伊首轮间接谈判结束 建设性对话继续

巴西一女排运动员怀孕5个月仍参赛 引发网友热议

一名乌克兰F-16飞行员死亡 泽连斯基誓言回应

私自带珍稀水稻种子出境获刑两年 种业安全警钟长鸣
本赛季库里罚球命中率93.3% 稳居榜首
日本人大幅抛售美国国债?自民党高官表态

默茨称将限制移民德国人数 减轻基础设施压力

宇田幸矢直言自己失误过多,并不是对方实力有多强
为什么每年体检无异常发现却是晚期?

美国威胁:美军已准备好了 若谈判失败将采取行动

关税救不了美国制造 违背经济规律

陈艺文回应“小熊”昵称由来:小时候婴儿肥特别壮
重庆回应大量矿泉水倒入长江 祈福行为不被提倡

和平路与西三环互通立交全面通车 改善区域交通环境
火箭落后雷霆16个胜场 创历史最大胜场差纪录
相关新闻
中国首个14万亿大省诞生 广东凭什么?
2025-01-16 16:10:24中国首个14万亿大省诞生广东凭什么国内首个光子AI智能引擎在南京诞生
2025-03-03 10:11:05国内首个光子AI智能引擎在南京诞生全球首个双足骨骼机器人诞生 科技新突破
《全球首个双足骨骼机器人:科技的新突破》2025年2月19日,波兰的Clone Robotics公司发布了全球首个双足肌肉骨骼机器人——protoclone V1,这是科技领域的一项重大突破
2025-02-25 01:04:50全球首个双足骨骼机器人诞生国内首个太空采矿机器人来了 开启星际资源探索新篇章
2025-03-16 17:53:18国内首个太空采矿机器人来了我国首个亿吨级页岩油田诞生 勘探取得重大突破
3月24日,中国石化新闻办宣布胜利济阳页岩油国家级示范区油气勘探取得重大突破。位于山东省淄博市高青县的新兴油田樊页平1区块,页岩层系石油探明地质储量达1.4亿多吨,技术可采储量达1135.99万吨
2025-03-26 03:36:20我国首个亿吨级页岩油田诞生30年来首个抗菌新药或将诞生 幽门螺杆菌治疗迎突破
2025-01-06 18:21:3030年来首个抗菌新药或将诞生