国内首个太空采矿机器人来了 开启星际资源探索新篇章
随着地球资源日益枯竭,人类开始将目光投向太空,特别是月球、火星和近地小行星等富含矿产资源的地方。太空采矿这一以往只在科幻小说和电影中出现的概念,正逐渐变为现实。
中国矿业大学刘新华教授团队研发出国内首台多功能太空采矿机器人。该机器人采用六足模式,包括三个轮足和三个爪足,旨在适应太空中的微重力环境。在地球上,机器人的重量足以支撑钻头钻进,但在月球或小行星上,由于重力较低,如何让钻头顺利钻进星体表面成为一大难题。为此,科研团队设计了特殊的爪刺足,这种结构在微重力环境下具有更强的附着能力和抓地能力,使机器人能够在固定位置进行采样,并根据地形移动。目前,这款太空采矿机器人原型机已申请专利并通过初审。
除了适应微重力环境,太空采矿机器人还需应对极端温差、真空、太空辐射以及重量体积限制等一系列挑战。刘新华教授团队为机器人搭建了一个模拟近地小行星表面环境的“训练场”,通过悬吊机构抵消重力,实现微重力的变化。经过不断训练,机器人已经能够调整自身结构形状,适应复杂地表环境。此外,机器人还需要在中国矿业大学深地工程智能建造与健康运维全国重点实验室进行更严格的测试,以模拟月球表面的极端环境,如六分之一地球重力、超高真空以及极端温度变化。
开发太空资源不仅代表科技竞争的新高度,也承载着未来人类文明可持续发展的希望。基于现有的空间科学技术、航空航天技术和采矿技术,人类有望在未来几十年内实现对近地星体上的太空资源的试验性开采。月球作为地球唯一的天然卫星,距离较近且资源丰富,是当前全球关注度最高的目标。月球表面的氦-3可作为核燃料,背面水冰资源也是重要资源。此外,太阳系中数量众多的小行星也蕴藏着丰富的矿产资源,尤其是稀土资源和金属资源,初步估计有1500多颗近地小行星具有高开采价值。
目前,全球科技界在地外天体钻孔技术、太空中原位资源利用等关键技术上取得了大量成果。新兴技术如太空3D打印技术的发展,进一步推动了太空采矿装备的制造和组装。这些进展使得人类在太空资源的开发利用方面充满期待。向外太空发展是人类社会未来发展的重要阶段,解决资源问题是关键一步。因此,太空采矿及月球资源的原位开采利用成为研究的重点。

外交部:西班牙首相此次访华非常成功 中西合作树立榜样

欧洲主要股指开盘集体上涨 涨幅均超1.7%
电影《孤独的美食家》曝终极预告!
电影《孤独的美食家》曝终极预告!

俄罗斯最新涉华表态 中俄石油合作前景广阔

反制美“对等关税”最好办法是什么 坚定推进高水平开放
欧洲主要股指开盘集体上涨 涨幅均超1.7%

火箭落后雷霆16个胜场 创历史最大胜场差纪录

美国进口订单出现崩溃迹象 关税冲击波引发预订冻结
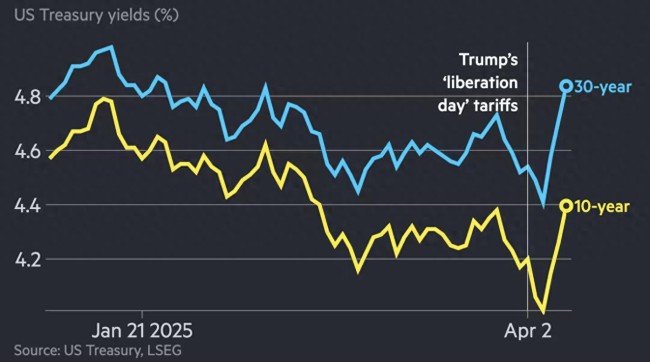
日本人大幅抛售美国国债?自民党高官表态
外交部:西班牙首相此次访华非常成功 中西合作树立榜样

美伊首轮间接谈判结束 建设性对话继续

媒体:欧洲版“星链”前路漫漫 自主之路挑战重重

本赛季库里罚球命中率93.3% 稳居榜首

默茨称将限制移民德国人数 减轻基础设施压力

热搜第一!人民币,大消息 跨境使用显著增长

美国威胁:美军已准备好了 若谈判失败将采取行动

关税救不了美国制造 违背经济规律

红山动物园疑打针打瘸大熊猫一条腿 疫苗误伤神经引发关注

一名乌克兰F-16飞行员死亡 泽连斯基誓言回应

巴西一女排运动员怀孕5个月仍参赛 引发网友热议

美国高管一家5口坠机遇难 美直升机无记录仪 事故调查面临挑战
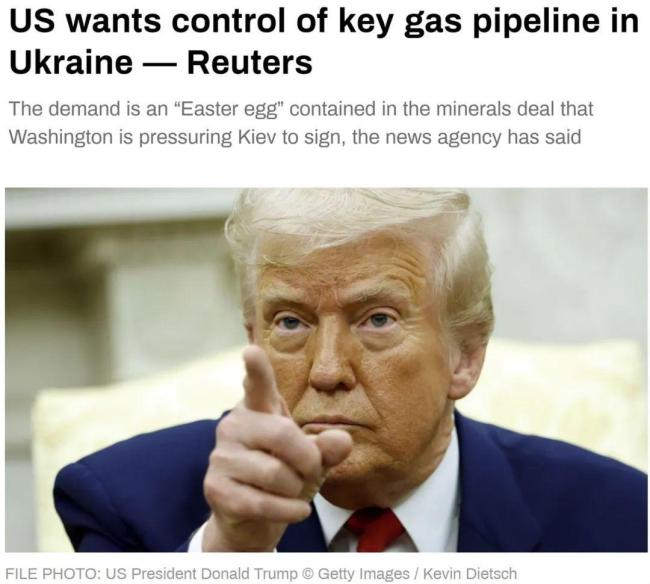
除了矿特朗普又欲控制乌天然气管道 新协议引发争议

特朗普两轮人事洗牌有何目的 调整对华策略
欧洲芯片厂齐声警告加税风暴 恐雪上加霜

何运晨领悟“理想offer”,职场新进阶

俄罗斯连环杀手承认杀害90人:还原自己用斧头杀人并焚尸过程

陈艺文回应“小熊”昵称由来:小时候婴儿肥特别壮

伊朗与美国首轮间接谈判结束 会谈将在下周继续进行

杨幂刘诗诗时隔16年再合作 诗幂同框引热议

和平路与西三环互通立交全面通车 改善区域交通环境

重庆回应大量矿泉水倒入长江 祈福行为不被提倡

北京解除大风黄色预警 风力逐渐减弱
国产半导体设备“攻守之势异也” 政策利好推动产业发展

私自带珍稀水稻种子出境获刑两年 种业安全警钟长鸣
相关新闻
国内首个太空采矿机器人来了!适应微重力环境
2025-03-17 12:38:00国内首个太空采矿机器人来了人形机器人来了,它能做什么?
在这个科技与想象交织的时代,我们正迈向全新阶段——机器变得越来越像我们。曾经只存在于科幻中的人形机器人,如今悄然走进我们的日常生活。
2024-11-01 10:00:37人形机器人来了全国首个机器人大厨获批上岗 煎饼机器人获食品经营许可
摊面糊、翻面,加料,再卷起来,手艺娴熟的煎饼果子师傅其实是一台煎饼机器人。这背后是100多项知识产权和8年的精心打磨。2023年底,市场监管总局修订发布了关于自动设备从事食品经营活动的规定
2025-02-25 23:32:49全国首个机器人大厨获批上岗首个人形机器人半马将举行,参赛机器人首次路测!
2025-04-08 13:18:40首个人形机器人半马将举行人造肌肉仿生机器人来了 最接近《西部世界》的人形机器人
西部世界式的仿生机器人似乎成为了现实。在人造肌肉驱动下,名为Torso的上半身机器人可以拱手作揖、前后左右转动脖子。它的肘部、颈椎、肩关节等都是模仿人类组织构建的,双手操作训练也在进行中
2024-10-29 07:46:50人造肌肉仿生机器人来了全球首个双足骨骼机器人诞生 科技新突破
《全球首个双足骨骼机器人:科技的新突破》2025年2月19日,波兰的Clone Robotics公司发布了全球首个双足肌肉骨骼机器人——protoclone V1,这是科技领域的一项重大突破
2025-02-25 01:04:50全球首个双足骨骼机器人诞生