宇树科技公布机器人交互控制新专利 提升控制精准性与响应速度
11月14日,宇树科技股份有限公司申请了一项名为“一种基于扩散策略的机器人交互控制方法和服务器”的专利。该发明属于机器人控制技术领域,旨在解决现有机器人控制模型对机器人未来状态认知不足的问题。
这项发明通过构建场景理解模型、场景交互预测模型以及扩散策略决策模型来预测机器人动作对场景的影响,并生成相应的交互场景变化信息。通过对这些信息进行处理,可以直接生成机器人的控制指令,从而实现对未来每个时刻状态的准确认知。这种方法能够准确理解机器人的动作,从场景端到机器人动作端进行全面控制,提高了控制的精准性和可靠性,同时提升了响应速度并简化了控制过程,使机器人能更好地适应各种复杂环境。
(责任编辑:zx0001)
关闭

郑雨张殊贤晋级全运会女双8强 轻松取胜晋级
郑雨张殊贤晋级全运会女双8强2025-11-15 14:52:18

玛莎拉蒂纯电车骨折式降价 对标新势力车型
玛莎拉蒂纯电车骨折式降价2025-11-15 14:52:02
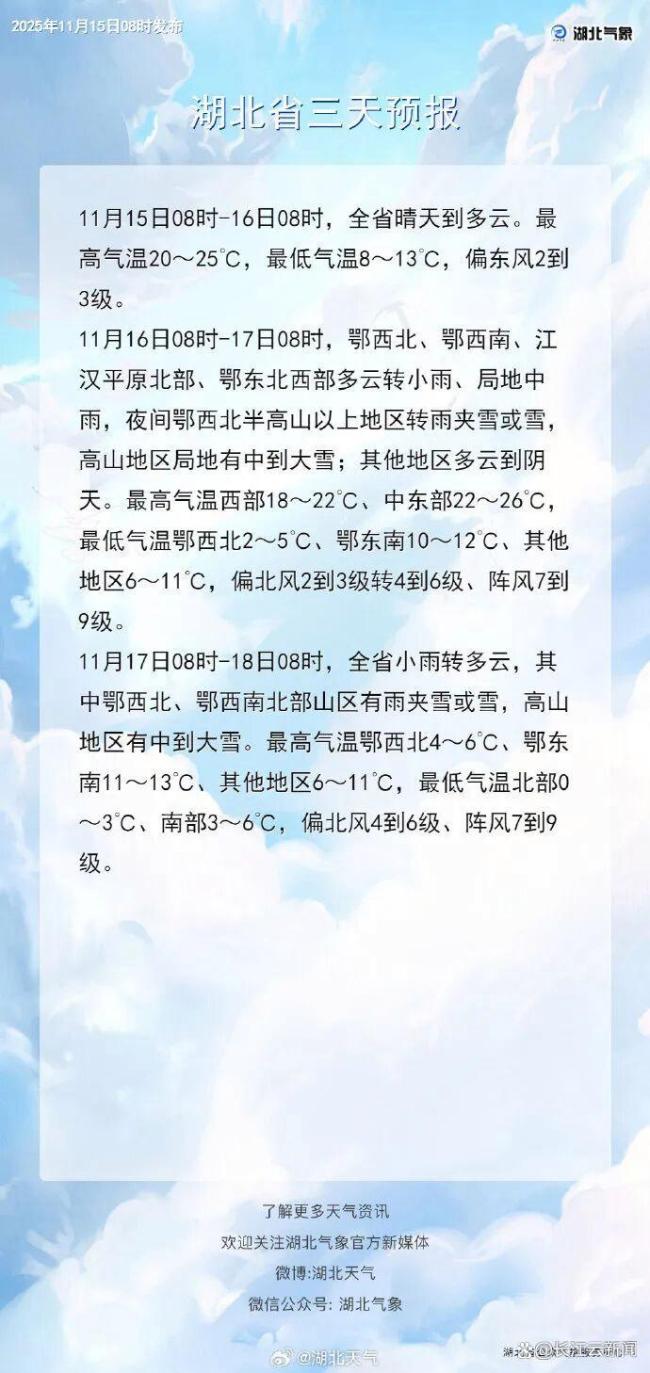
湖北下半年首场寒潮天气要来了 气温骤降迎大风雪
湖北下半年首场寒潮天气要来了2025-11-15 14:51:07
台前民代:民进党赔了夫人又折兵 民调显示民众归功在野党
台前民代,民进党赔了夫人又折兵2025-11-15 14:50:35

特朗普要查克林顿与爱泼斯坦关系 调查名单扩大
特朗普要查克林顿与爱泼斯坦关系2025-11-15 14:51:01
玛莎拉蒂纯电车骨折式降价 对标新势力车型
玛莎拉蒂纯电车骨折式降价2025-11-15 14:52:02

副省长与乒乓球前世界冠军贪腐细节曝光 世界冠军受贿逾亿元
副省长与乒乓球前世界冠军贪腐细节曝光2025-11-15 14:30:20

新党呼吁赖清德恢复“国统纲领” 废除“台独党纲”
新党呼吁赖清德恢复国统纲领2025-11-15 09:29:30
湖北下半年首场寒潮天气要来了 气温骤降迎大风雪
湖北下半年首场寒潮天气要来了2025-11-15 14:51:07
宇树科技IPO辅导完成 迈向成熟运营新阶段
宇树科技IPO辅导完成2025-11-15 14:26:27

樊振东再次追平 激战六局胜王楚钦
樊振东再次追平2025-11-15 14:40:20

印控克什米尔地区一警察局突发爆炸 至少7死27伤
印控克什米尔地区一警察局突发爆炸2025-11-15 13:05:34

媒体:属实看不懂德国让沈伯洋入境 重蹈覆辙
媒体,属实看不懂德国让沈伯洋入境2025-11-15 10:08:02

媒体:日本若碰红线新账旧账一起清算 历史伤痕未愈
媒体,日本若碰红线新账旧账一起清算2025-11-15 09:32:57

美国男子险些被宠物狗击毙 离奇“枪击案”背后的真相
美国男子险些被宠物狗击毙2025-11-15 14:38:42
郑雨张殊贤晋级全运会女双8强 轻松取胜晋级
郑雨张殊贤晋级全运会女双8强2025-11-15 14:52:18

王楚钦樊振东都去换球衣了 全运会男单半决赛激战
王楚钦樊振东都去换球衣了2025-11-15 14:28:23

暖气不热就放放水?很多人都做错了 正确排气是关键
暖气不热就放放水,很多人都做错了2025-11-15 14:37:17
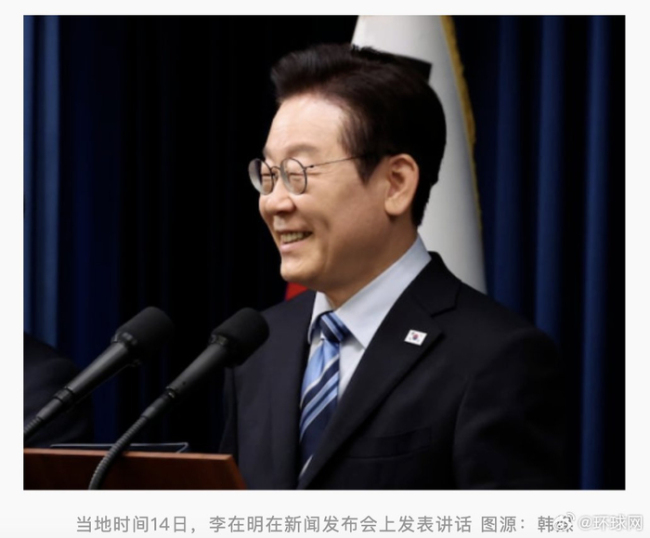
李在明:毫不动摇推进中韩关系发展 持续对话稳定关系
李在明,毫不动摇推进中韩关系发展2025-11-15 09:32:28
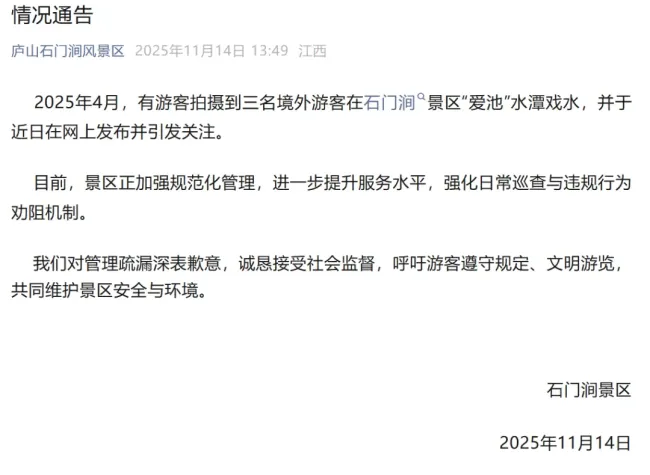
3名外籍男子在庐山戏水?景区致歉 管理疏漏引关注
3名外籍男子在庐山戏水,景区致歉2025-11-15 14:37:33

俄罗斯会保护委内瑞拉吗 俄外长明确否定军事援助
俄罗斯会保护委内瑞拉吗2025-11-15 12:58:35

邵永灵:高市暗示修改无核三原则 态度谨慎引发关注
邵永灵,高市暗示修改无核三原则2025-11-15 14:23:09

马英九:两岸问题不能假手外国 强调自主解决分歧
马英九,两岸问题不能假手外国2025-11-15 13:08:18

李在明:继续推进中韩两国关系发展 平衡外交引关注
李在明,继续推进中韩两国关系发展2025-11-15 09:30:41

王楚钦樊振东两度扳平 激战六局定胜负
王楚钦樊振东两度扳平2025-11-15 14:45:11

俄军打出“死亡公路” 无人机封锁下的惨烈战场
俄军打出死亡公路2025-11-15 13:08:35

樊振东连续四届晋级全运会决赛 卫冕在望
樊振东连续四届晋级全运会决赛2025-11-15 14:34:50
郑丽文:台湾只有接受“一个中国”,才能确保台湾的生存
郑丽文接受日媒专访倡导一中保台2025-11-15 10:06:19

台湾民众向高市早苗发出严重抗议 中方强烈回应引发关注
台湾民众向高市早苗发出严重抗议2025-11-15 14:17:21

樊振东战胜王楚钦,挺进全运会乒乓球男单决赛
樊振东第四局11比7王楚钦2025-11-15 14:23:26

托卡耶夫前脚离开白宫后脚就去克宫 平衡大国关系
托卡耶夫前脚离开白宫后脚就去克宫2025-11-15 09:32:40

王楚钦心态起伏有点大 比赛后期显焦躁
王楚钦心态起伏有点大2025-11-15 14:45:34

专家:特朗普执政根基被动摇 三重打击引发危机
专家,特朗普执政根基被动摇2025-11-15 09:33:15

再成“能战之国”?日本野心昭昭 图谋拥核与军事扩张
再成能战之国,日本野心昭昭2025-11-15 09:30:57

特朗普:将向BBC索赔10亿到50亿美元 诉讼威胁震动媒体界
特朗普,将向BBC索赔10亿到50亿美元2025-11-15 14:35:41
相关新闻
宇树科技机器人手指专利获授权 创新设计提升握持稳定性
近日,宇树科技股份有限公司申请的“一种机器人手指、机器手和人形机器人”专利获得授权。该专利涉及机器人技术领域,提供了一种新型的机器人手指设计
2025-11-12 23:45:50宇树科技机器人手指专利获授权宇树科技因专利纠纷被起诉 明日开庭审理
宇树科技面临一起涉及专利问题的诉讼,案件将于8月26日在杭州市中级人民法院开庭审理
2025-08-26 11:55:02宇树科技因专利纠纷被起诉宇树科技专利案一审胜诉 未构成侵权
浙江省杭州市中级人民法院对宇树科技被杭州露韦美日化有限公司诉侵害发明专利权一案作出一审判决。法院驳回了原告杭州露韦美日化有限公司的全部诉讼请求,认定宇树科技未构成侵权
2025-09-30 13:17:56宇树科技专利案一审胜诉宇树科技新海报:新机器人即将亮相 26关节自由度揭秘
每经快讯,5月30日,宇树科技官方微信公众号发布了海报,展现一个新机器人剪影,并配文“26 joint DOF(6*2+2+5*2+2)”
2025-05-30 21:53:56宇树科技新海报宇树科技新专利优化人机交互体验 仿生人脸提升亲和度
2025-10-22 12:29:33宇树科技新专利优化人机交互体验宇树人形机器人格斗表演赛 科技与热血交织
2025-05-26 10:59:13宇树人形机器人格斗表演赛