机器人“会用手”了 灵活操作工具成现实
机器人“会用手”了 灵活操作工具成现实。灵巧手如果不会使用工具,就跟夹爪没什么区别。现在,能拧螺丝、抡锤子,玩转各类工具的灵巧手已经问世了。这款灵巧手出自银河通用最新推出的神经动力学模型DexNDM。

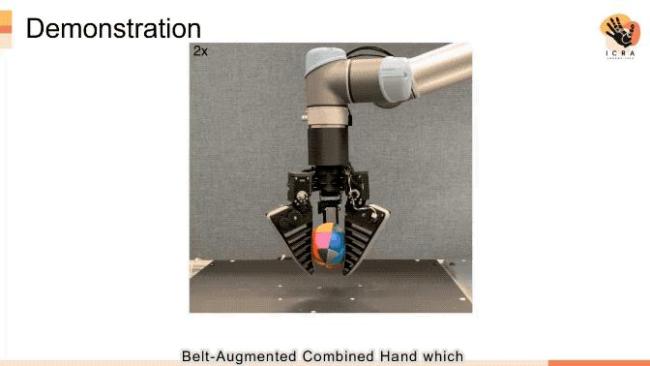
在DexNDM的支持下,灵巧手实现了从能动到能用的飞跃。通过分布有偏的真实数据训练,无需成功示例,即可精准弥合Sim2Real鸿沟,首次让通用灵巧手能够对多类物体实现稳定、多姿态、多轴向的旋转操作。无论是微小零件还是大书本、长棍、复杂几何体,都能实现跨类别、跨尺寸、跨姿态的稳定旋转。无论手掌朝上、朝下或侧向,均能沿任意轴向进行稳定、持续的旋转。此外,DexNDM还能自如地抓、转、拧各类工具,胜任拧螺丝、家具组装等长程、复杂操作任务。

DexNDM的核心突破在于首次在真实世界中突破了手掌任意朝向的物体旋转限制,实现了跨物体、跨姿态的稳定手内旋转与工具操作。具体来说,DexNDM能在极具挑战的手腕姿态下(如手掌朝下或侧向),实现长物体沿长边的连续旋转,以及小物体在多种转轴下的稳定旋转。它能处理从小型到细长、从简单几何到复杂结构的多种物体。

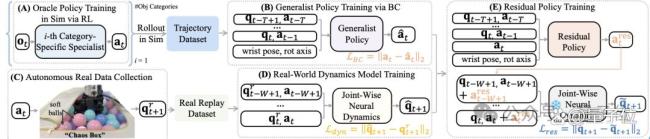
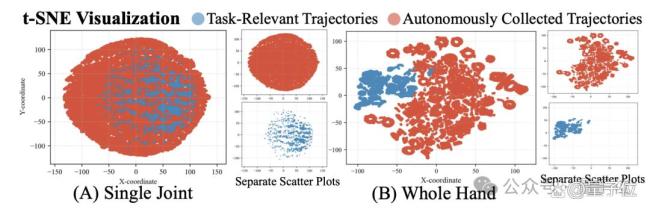
DexNDM的关键在于其关节级神经动力学模型。不同于以往整手建模的方式,DexNDM将复杂的手–物交互拆解到关节级,让每个关节独立预测自身的下一状态,完成整手的运动预测。这种分解不仅显著提升了数据利用效率,还能增强模型在不同物体、姿态下的泛化能力。为了学习到具有良好泛化性的动力学模型,团队开发了一套全自动数据收集策略。在任务无关的随机扰动下,机器人能自主生成丰富的接触数据,不用人工重置,也不会频繁“翻车”。
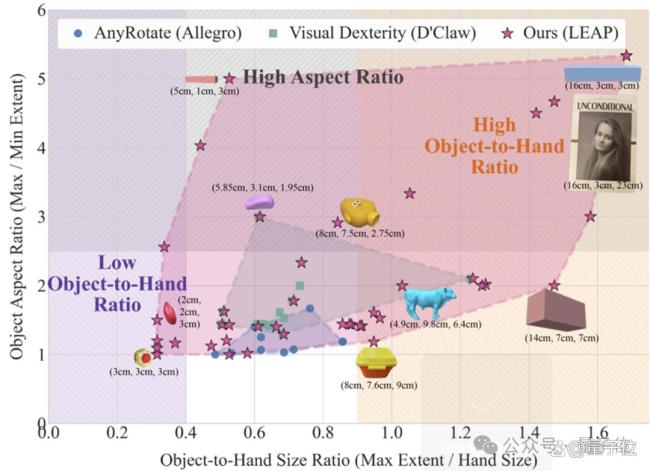
基于此,研究者进一步训练了一个残差策略网络,用于弥合仿真到现实的差距,使仿真中学到的基础策略能够顺利迁移到真实世界。在策略学习上,DexNDM采用了“从专家到通才”的训练流程:先针对不同长宽比与几何复杂度的物体训练多个专家策略,再将它们融合提炼为一个统一的通用策略,从而实现跨任务、跨形态的稳定操作。仿真与真实环境的测试表明,DexNDM的操作灵活性、鲁棒性与泛化能力都得到了显著提升。
DexNDM还被作为底层技能接入遥操作系统。操作者只需通过VR控制器给出臂端位姿或旋转轴等高层指令,DexNDM即可自主完成手指层面的精细控制。这种方式克服了传统遥操作在精细操作中的根本难题——人手与机械手在自由度、传感和动力学上的不匹配。借助DexNDM,机器人不仅能“抓得稳、放得准”,还能完成复杂的、涉及旋转的手—物—物交互,实现工具使用与长程装配等对系统鲁棒性要求极高的任务,真正迈向“能转能用”的灵巧操作。
DexNDM解决的是机器人研究中最具挑战性的手内操作中的关键问题——手内旋转。这一突破推动了机器人从简单能力向精细操作能力的跨越。整体来看,机器人的能力大致可分为运动能力和操作能力两类。如今,机器人不再需要被绳子吊着防摔,甚至在人为干扰下仍能稳住身形。然而,站稳之后,想让机器人真正具备生产力,关键还在于操作。所谓操作,就是机器人真正“动手干活”的能力,包括抓取、环境辅助操作、柔性物体操作、手内操作和工具操作。

虽然目前大部分的末端执行器都能很好地完成抓取任务,但简单抓取的应用范围十分有限,主要集中在上下料、分拣等场景,远未触及真正的工业级生产力。因此,灵巧操作必须从“能抓能放”迈向“能转能用”,以实现更复杂、更精细的动作。DexNDM的突破在于同时攻克了“旋转”和“使用”这两大难题:既能实现高精度的手内旋转,也能灵活处理多种工具的操作任务。只有当机器人能可靠地完成这类操作,语言、视觉等高层智能规划才能真正落地为具体的动作与执行。这正是通用机器人与具身智能落地的关键瓶颈。

直观地看,在拧螺丝这样的场景中,灵巧手无法像手掌朝上时那样依赖重力来稳定物体。为了不让螺丝刀滑落,模型必须精确控制更多的自由度,实现对姿态、力和接触的协调控制。过去的手内操作方法大多只能处理特定物体或固定姿态,依赖昂贵或定制化硬件,难以推广到更通用的场景。DexNDM实现了实质性飞跃——首次构建了能够跨物体类别、跨姿态任务的通用手内操作策略。它不仅为遥操作系统的数据生成与策略迁移提供了坚实基础,也为灵巧操作的工业化落地奠定了条件:样本效率更高、泛化性更强、能力可复用,为具身智能研究提供了新的底层基础设施。

DexNDM的意义不仅在于一个新的模型,更在于它推动了灵巧操作这一“皇冠上的明珠”从学术研究走向了可复用的生产力基础设施。从最初的搬箱、上下料,到如今能拧螺丝、砸钉子、装配家具、使用工具,灵巧操作正逐步从机械重复劳动者,进化为真正具备操作智慧的“生产力单元”。借助这一底层能力,机器人不再局限于演示性的“抓取放置”,而能在工业装配、家具组装、工具使用等多场景中实现可扩展部署,持续提升实际生产力。

固体杨枝甘露糖葫芦!

中国男子在泰失踪2日后身亡 最后视频曝光

俄罗斯推出首款国产人形机器人 艾多尔具备情绪识别功能

日本女政客叫嚣参战,话音刚落,前首相怒斥:你想害死日本?

乌军失守红军城已成定局吗 俄军全面控制交通枢纽

响应号召种树成材后被禁止采伐 农户二十余年护林心酸史

特朗普称接近和印度达成贸易协议 双边关系迎来缓和

牛弹琴:新德里和伊斯兰堡爆炸很蹊跷 幕后玄机待解

空军发布有人无人协同画面 展示先进战斗力

经济学家谈黄金投资 市场躁动下的理性思考
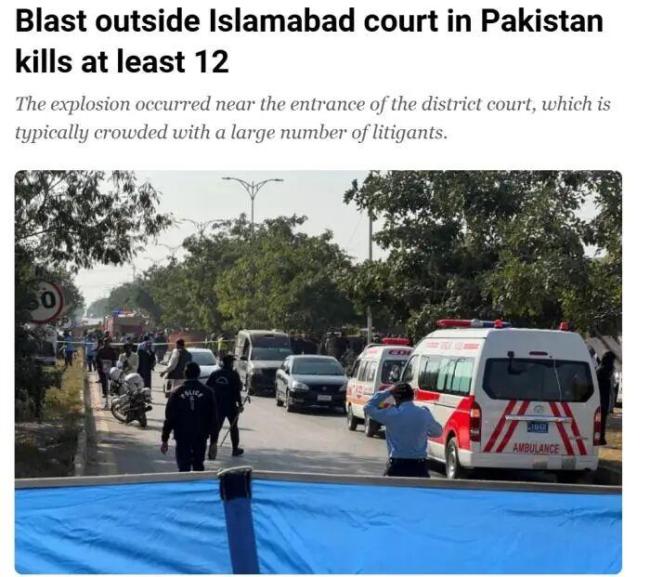
两国首都遭袭 印巴走在危险钢丝上 紧张局势升级
某局工作邮箱密码太简单被间谍猜解 弱密码危害重重

日首相凌晨3点开会因为传真机卡了 引发加班争议

赵继伟伤退 辽篮止步半决赛 无缘全运三连冠

俄军借浓雾掩护进入红军城 摩托军团雾中突袭

沙拉访美后叙利亚会倒向美国吗 外交突破口与变数并存
印度电诈人员被遣返 泰方称均为自愿 缅军突袭后逃至泰国被捕

塔斯汀三个月关了快400家店 扩张背后的隐忧

于子迪破亚洲纪录夺冠 刷新个人最好成绩

大量俄军骑摩托车涌入红军城南部 雾中突袭成功

台退将称高市早苗认不清实力 激进表态引发担忧

河南中原“村BA”赛场一名球员被打 冲突致比赛混乱

捐款造航母小伙获赠手表 26年后心愿成真

不安全感让以色列年轻人寻求移民 战争阴影下的抉择

曝特朗普暂缓打击委内瑞拉 再次展现不可靠特质
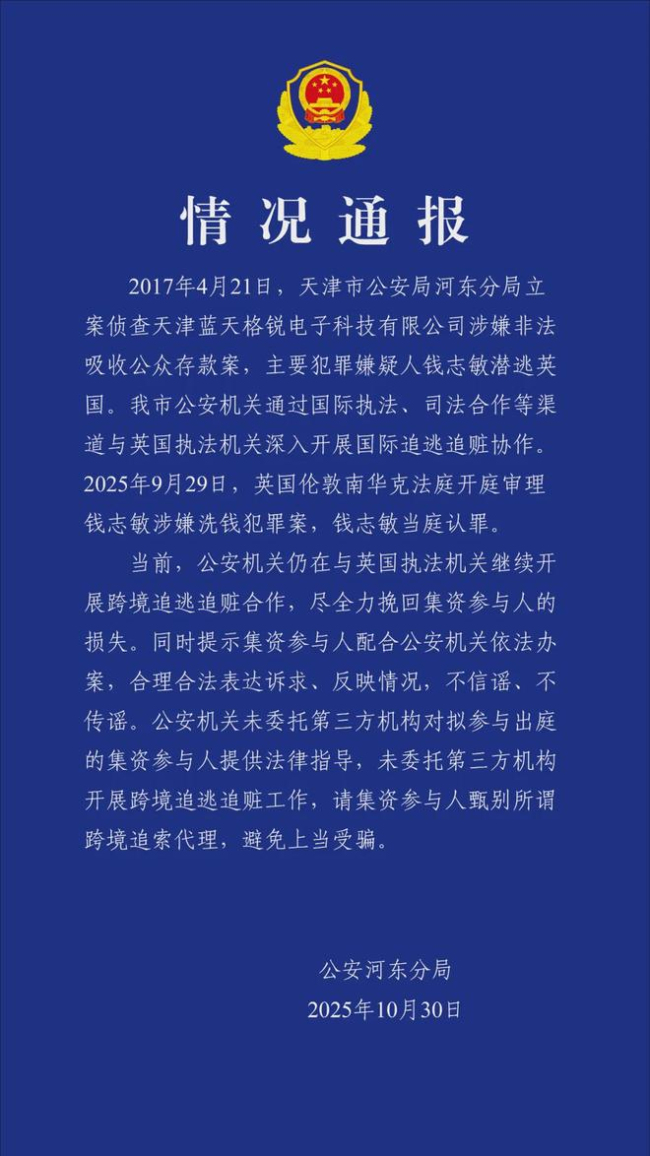
英国警方披露钱志敏抓捕画面 当庭认罪面临判刑

俄苏34战机炸毁乌军指挥所:深夜呼啸起飞 空投重磅炸弹消灭大量乌军 钢刀旅指挥部瞬间蒸发

医生:赵鸿刚想完全康复已不可能 手术风险高改善有限

外交部回应印度汽车爆炸事件 中方暂无人员伤亡
固体杨枝甘露糖葫芦!

大张伟透露曾在荷兰遭砸车盗窃 海外防盗需警惕

美国联邦政府距离重启还有多远 临时协议难解根本问题
中国男子在泰失踪2日后身亡 最后视频曝光

红军城巷战正酣 俄军能否月内拿下 迷局未定
俄罗斯推出首款国产人形机器人 艾多尔具备情绪识别功能
相关新闻
人形机器人会更快更高更强 创新应用加速推进
2025-09-01 08:37:40人形机器人会更快更高更强小鹏机器人会走猫步太像人了 仿生技术惊艳亮相
在第七届小鹏科技日上,小鹏展示了其最新研发的人形机器人IRON。这款机器人以优雅的步伐登场,引起广泛关注
2025-11-05 17:30:02小鹏机器人会走猫步太像人了机器狗 机器狼 无人作战新力量
在九三阅兵中,陆上无人作战方队首次亮相,其中“机器狼”尤为引人注目。网友评价其外形可爱但战斗力惊人。与“机器狗”相比,“机器狼”的战斗力更强,成为此次阅兵的一大亮点
2025-09-04 20:56:51机器狗机器狼阅兵的“机器狼”与机器狗有啥区别 无人作战新突破
在九三阅兵中,陆上无人作战方队接受了检阅。其中,“机器狼”引起了广泛关注,网友们评价说这种装备看起来有点萌,但战斗力却非常强。新域新质作战力量成为这次阅兵的一大亮点
2025-09-04 19:27:08阅兵的机器狼与机器狗有啥区别机器人的发展潜力有多大?
2025-10-11 14:30:26机器人的发展潜力有多大机器人又“整活”了! 宇树科技机器人要在数贸会打拳击
明天将迎来又一届全球数字贸易博览会,我们记者小钰今天提前探馆,一进门就看到宇树科技的机器人在挥拳,“春晚”归来后,这位“舞者”似乎成为了一位“武者”.........
2025-09-25 09:45:45宇树科技机器人要在数贸会打拳击