王兴兴极限测试机器狗 国产机器狗反超波士顿动力

在一条笔直的公路上,四足机器人“黑豹”正加速追赶前方奔跑的运动员。镜头从俯瞰到平视,记录下机器人反超的过程,定格的一瞬,“黑豹”只留下一道黑色残影。这只仿生四足机器人是今年1月发布的第二代产品,不到1秒便能从静止切换到冲刺状态,最快移动速度可达10米/秒,打破了波士顿动力“野猫”保持了十余年的世界纪录,仅比博尔特慢了一点。
速度是综合性能的体现。浙江大学杭州国际科创中心人形机器人创新研究院研究员金永斌解释,这如同赛车之于汽车工业的发展,对百公里加速极限的突破反映了汽车电机性能、系统延时、结构强度和轻量化设计等多方面因素。最终,新技术通过低成本模式完成民用化转移。
四足机器人俗称机器狗。自波士顿动力“大狗”问世以来,已过去二十年。机器人在复杂地貌的通过性能不断提升,质量更轻、负载更重、速度更快,但走向应用规模化仍面临挑战。价格和应用场景是四足机器人批量化应用的门槛。随着相关技术不断突破,国内外科技企业竞相探索产品的高性价比与新市场。
如何让机器狗跑得更快?传统的做法是使用更强大的电机,造出更高大的身体,但这在商业化方面难以走通。新一代机器狗能否从设计思路方面优化?奔跑速度最快的机器狗纪录由波士顿动力保持,其多年前发布的宣传视频中,机器狗“猎豹”在实验室中跑出了超过13米/秒的速度。然而,“猎豹”的高速是在没有风载的跑步机上实现的,还需一台巨型远程电源供电,存在诸多局限。2013年,以“猎豹”为原型的“野猫”问世,可以在户外自由奔跑,但速度降至8.89米/秒。
浙江大学的“黑豹”身形更为小巧,站立高度63厘米,体重38公斤,分别只有“野猫”的约一半和四分之一。研发团队利用惠更斯耦合摆原理,让机器狗四足协调成统一步态,形成合力达成高速冲刺。高速运动对机器人的结构和材质强度提出了更高要求。当“黑豹”奔跑速度提高到6米/秒时,遇到了小腿折断的新挑战。团队学习自然动物在髋关节、膝关节、脚掌等运动构型上的特征,提升机器人的强度和韧性,并研发了“仿跳鼠碳纤维小腿”,在重量仅提升16%的情况下刚度提升135%。

康辉靳东等被聘为中国节水大使 助力节水成社会风尚
日照俩未成年人外出未归已找回 警方回应

孙颖莎土拨鼠尖叫 展现可爱一面

俄官员:30天停火提议只是为乌军提供喘息的机会 乌军争取时间重新部署
孙颖莎土拨鼠尖叫 展现可爱一面

朝鲜谴责西方议论朝“弃核”问题

家长拿放大镜去看老师的行为,苛责之下老师只能退缩,这是最悲哀的

杜特尔特劝说女儿回国有何目的 政治局势微妙变化

欧盟要推动与美国“防务脱钩”吗 欧洲军工自主化加速
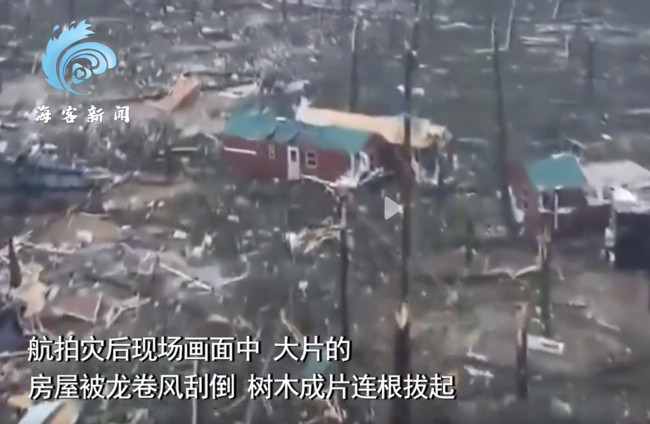
美多地风暴已致37人死亡 航拍灾后现场:房屋被刮倒 树木成片连根拔起
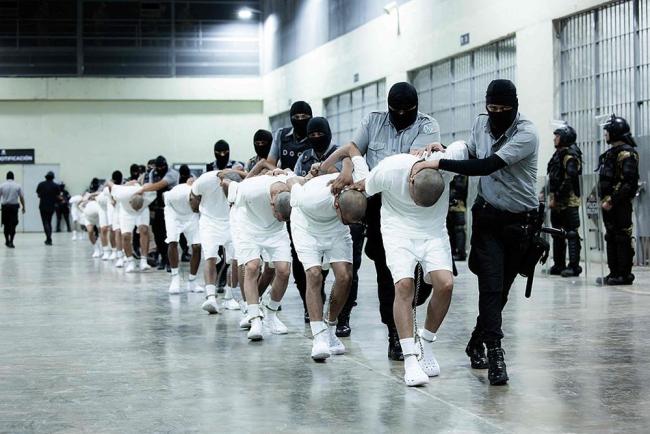
特朗普援引1798年法律驱逐委内瑞拉黑帮 部分成员已抵萨尔瓦多一监狱 白宫与法院新博弈

美联储议息周震撼登场:鲍威尔会否也将对美股大跌“见死不救” 市场动荡加剧决策风险

西北首例!一胎儿在妈妈肚子里4根手指被“缠住”

恶劣天气袭击美国多地 已致36人死亡

美官员:预计特朗普和普京本周将进行交谈

俄官员:30天停火提议只是为乌军提供喘息的机会

立足防反,国足或有三大后手:张玉宁、塞尔吉尼奥和王钰栋 替补奇兵待命

三名网红街头拍低俗视频被行政处罚 低俗表演引发群众围观

为何说杜特尔特可能有救了 中方揭露管辖漏洞

特朗普引用的18世纪法律是什么 战时权力争议再起

巴基斯坦一客车遇袭,已造成3名军人2名平民死亡 3名恐怖分子被当场击毙

北京今日北风较大,山区局地阵风可达9级以上
日照俩未成年人外出未归已找回 警方回应

男子请事假照顾岳父被拒,让劳动者请事假“有据可依”

400万法拉利开400公里就黑屏

美财长称无法保证美经济不会衰退 通胀与关税政策引担忧
康辉靳东等被聘为中国节水大使 助力节水成社会风尚

美国否认航母被胡塞武装袭击 无人机未接近目标

日本拟在九州率先部署远程导弹 强化西南防卫机制

CBA两超级外援禁赛:迪亚洛9T 克里斯11T 山西效仿广东换人注册 外援调整成焦点
谁在保护金秀贤 韩娱系统性压迫揭秘

韩国因何被美国“拉黑” 核想法惹的祸

台民调:58%民众反对大罢免 主流民意不赞成
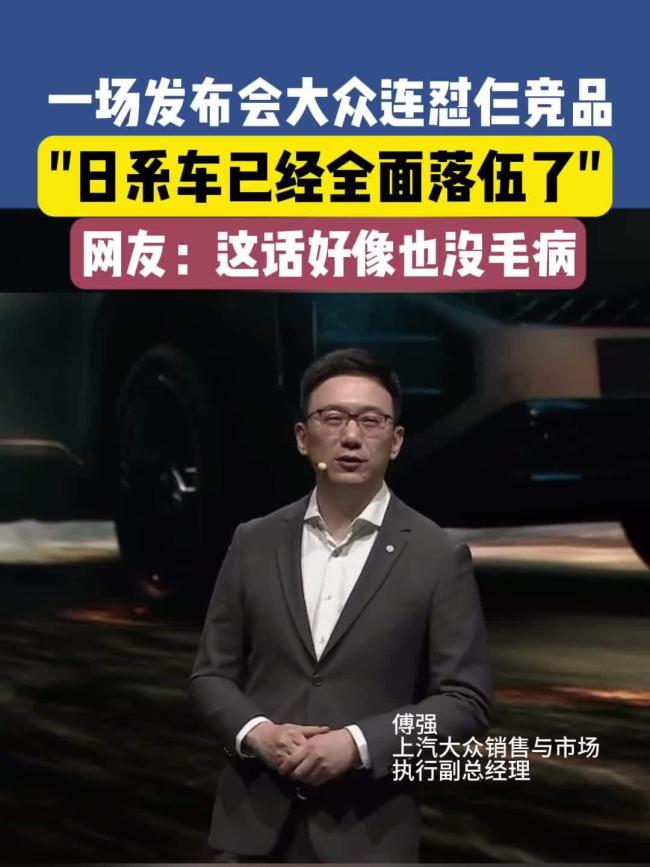
上汽大众高管称“日系车已经全面落伍”,东风日产高管回怼:典型的五十步笑百步 车企互怼引发热议

3000亿元加码支持以旧换新
相关新闻
35岁的王兴兴,刺痛了谁
2025-02-19 10:10:5035岁的王兴兴刺痛了谁王兴兴:2025是机器人爆发临界点 技术与市场驱动
在科技快速发展的今天,机器人技术正以前所未有的速度改变着我们的生活和工作方式。王兴兴最近的一次演讲中提到,2025年将是机器人爆发的临界点,这一观点引起了广泛关注与讨论
2025-02-27 07:50:11王兴兴王兴兴坦言自己偏科曾经成绩很差:塞翁失马焉知非福
2025-02-21 02:36:42王兴兴坦言自己偏科曾经成绩很差刘永好肯定王兴兴 人形机器人前景可期
刘永好认为人形机器人的发展取得了显著进步,从最初的笨拙到现在的敏捷,变化明显。他相信未来人形机器人进入家庭是必然趋势,但还需要一定时间
2025-02-28 08:26:49刘永好肯定王兴兴王兴兴预计年底机器人跑速超博尔特 技术再创新高
今年央视春晚期间,著名电影导演张艺谋与杭州宇树科技、新疆艺术学院合作推出节目《秧BOT》。节目中,人形机器人身穿花坎肩,手持手绢扭秧歌,动作喜感十足,甚至能完成“0帧起手转手绢”的高难度动作
2025-02-22 10:09:50王兴兴预计年底机器人跑速超博尔特宇树科技王兴兴回到上海母校 共建智能机器人研究院
2月23日,宇树科技CEO王兴兴回到了母校上海大学。作为2013级机械工程专业的硕士研究生,他在创业8年后在这里设立了新的产教机构
2025-02-24 18:11:32宇树科技王兴兴回到上海母校